Posizionamento (GNSS)¶
QField può utilizzare il GNSS interno (Sistema di Navigazione Satellitare Globale, come GPS, GLONASS, Galileo o Beidou). QField può anche connettersi ad antenne esterne tramite flussi NMEA via Bluetooth, TCP o UDP collegamento.
I dispositivi GNSS possono anche misurare l'altitudine sulla superficie terrestre vicina alla posizione 2D attuale.
Visualizzazione¶
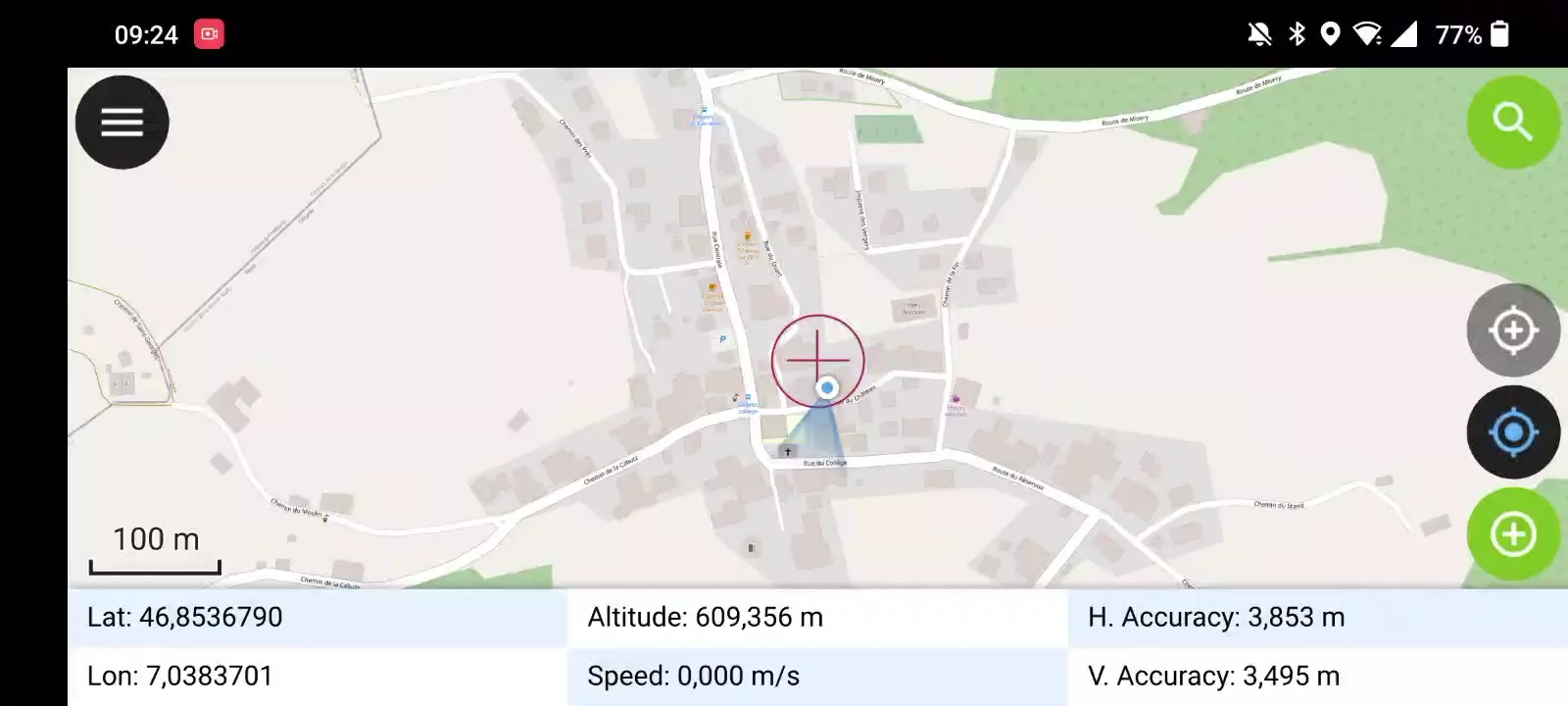
Quando la localizzazione è attivata, la tua posizione è visibile in blu sulla mappa. La tua posizione è visibile come un punto blu se sei fermo oppure come una freccia indicante la tua direzione se ti stati spostando.
Il fascio blu indica l'orientamento del tuo dispositivo se dispone di una bussola magnetica.
Un cerchio attorno alla tua posizione attuale indica la precisione come riportata dal dispositivo di posizionamento.
Configurazione¶
Le seguenti impostazioni sono disponibili nella scheda Posizionamento delle impostazioni QField.
Valore della Misura (M)¶
Quando si digitalizza una geometria su un vettore contenente una dimensione M, QField aggiunge un valore di misura ai singoli vertici ogni volta che il cursore delle coordinate viene bloccato nella posizione corrente.
Per impostazione predefinita, il valore rappresenterà il timestamp della posizione catturata (milliseconds since epoch). È possibile modificare questo valore utilizzando la casella combinata nella scheda di posizionamento delle impostazioni.
I valori disponibili tra cui scegliere sono timestamp, velocità al suolo, cuscinetto, accuratezza orizzontale ed accuratezza verticale, nonché PDOP, HDOP e VDOP.
Requisiti di accuratezza¶
Può essere definita un'accuratezza minima desiderata per le misurazioni. La qualità sarà riportata in tre classi, scarsa (rosso), ok (giallo) e eccellente (verde). Questi colori appariranno come un punto sopra il pulsante GNSS.
Le soglie possono essere definite nella scheda di posizionamento delle impostazioni.
Se l'impostazione Abilita requisito di accuratezza è attivata, non sarà possibile raccogliere nuove misure con il cursore di coordinate bloccato nella posizione corrente con un valore di accuratezza negativo (rosso).
Compensazione altezza antenna¶
L'altezza del palo dell'antenna in uso può essere definita nelle impostazioni. Qualsiasi altitudine misurata sarà corretta con questo valore.
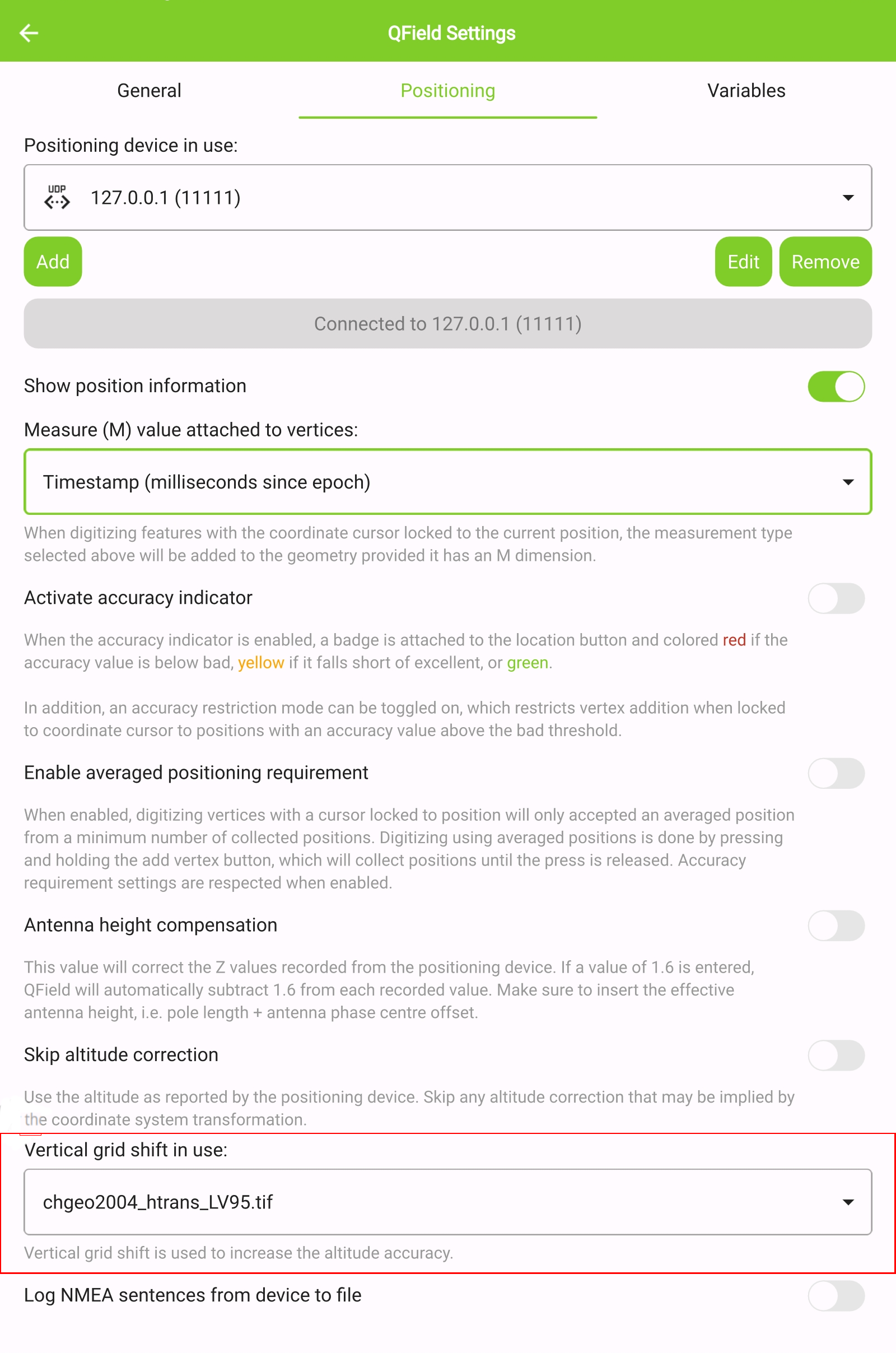
Correzione altitudine / traslazione verticale della griglia¶
I valori di altitudine possono essere corretti con i file di traslazione verticale della griglia per calcolare l'altezza ortometrica.
I file di traslazione verticale della griglia devono essere resi disponibili a QField inserendoli
nella cartella dell'app QField <drive>:/Android/data/ch.opengis.qfield/files/QField/proj.
Una volta che il file di traslazione verticale della griglia è posto lì, è disponibile in QField nelle Impostazioni di posizionamento in Traslazione verticale griglia in uso.
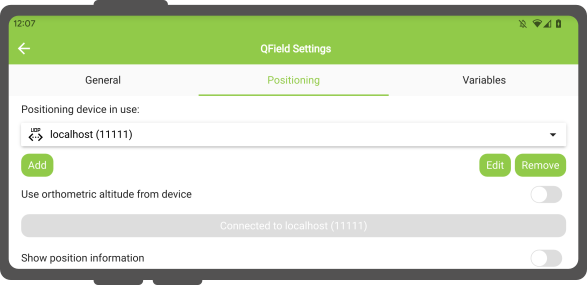
Se si utilizza la correzione dell'altitudine e si utilizza un dispositivo di posizionamento esterno, si consideri di impostare Utilizzare l'altitudine ortometrica da dispositivo come spento.
I formati attualmente supportati sono:
- GeoTIFF (.tif, .tiff)
- NOAA Vertical Datum (.gtx)
- NTv2 Datum Grid Shift (.gsb)
- Natural Resources Canada's Geoid (.byn)
For example: For the transformation from ETRS89 (reference ellipsoid GPS) to NAP (Dutch) users can download the file nlgeo2018.gtx from NSGI and put it in the directory.
To obtain precise altitude data for Cadastral Surveying in Switzerland, users can access the file correction of the vertical grid shift through Geoid OGD from Swisstopo.
Following the download, users are advised to perform a conversion of the file labeled chgeo04_htrans_lv95.agr to chgeo04_htrans_lv95.gtx.
The QGIS processing algorithm gdal:translate (convert format) can be used for that.
Uso¶
Lavoro sul campo
Premendo brevemente il pulsante GNSS, il GNSS e il centra della posizione corrente verranno attivati non appena le informazioni di posizionamento saranno disponibili.
Attiva la modalità edit e premi sul pulsante target. La croce al centro significa che sta usando il posizionamento GNSS.

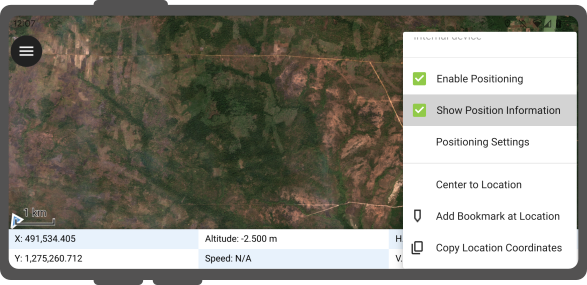
Premendo a lungo il tasto GNSS viene visualizzato il menu di posizionamento.
All'interno del menù di posizionamento è possibile attivare il Mostra informazioni sulla posizione che mostrerà le coordinate correnti che vengono proiettate nel SR del progetto insieme alle informazioni di precisione.
Note
Se vedi le informazioni WGS 84 lat/lon invece delle informazioni nel SR del tuo progetto, è probabile che tu non abbia ancora segnale.
Utilizzo di un Ricevitore GNSS esterno¶
Lavoro sul campo
QField supporta la connessione a dispositivi di posizionamento GNSS esterni tramite flussi NMEA tramite connessioni Bluetooth, TCP o UDP.
In Impostazioni > Posizionamento è possibile trovare una serie di pulsanti per aggiungere, modificare o eliminare dispositivi esterni, nonché un elenco a discesa per passare da dispositivi GNSS interni a quelli esterni salvati.
La ripartizione delle connessioni supportate per piattaforma è la seguente:
| Android | iOS | Windows | Linux | MacOS | |
|---|---|---|---|---|---|
| Bluetooth | * | ||||
| TCP | |||||
| UDP | |||||
| Porta seriale |
(*) Il supporto Bluetooth su Windows avviene tramite la porta seriale virtuale creata automaticamente dal sistema operativo quando si connette al dispositivo GNSS.
The NMEA sentences currently supported are GGA, RMC, GSA, GSV, GST, VTG, HDG and HDT.
Attenzione
Assicurati che nessun'altra applicazione, come i fornitori di posizione simulata, stia utilizzando la stessa connessione.
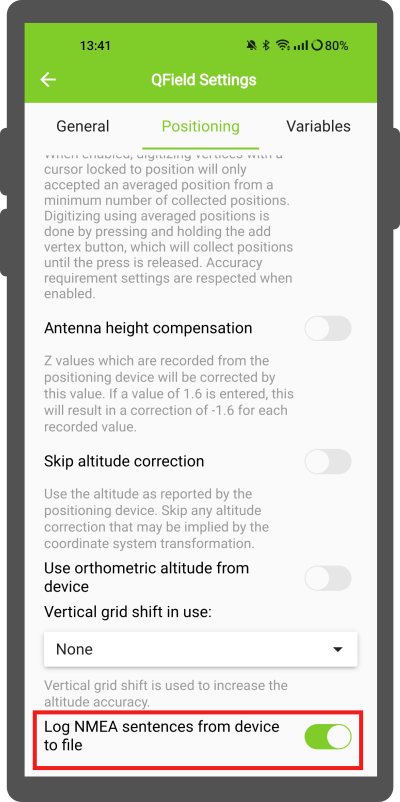
Registro dei ricevitori esterni¶
In Impostazioni > Posizionamento se avete selezionato un ricevitore esterno come dispositivo di posizionamento, troverete un'opzione Registra gli eventi NMEA da dispositivo a file. Se abilitata, tutti gli eventi NMEA provenienti da dispositivi di posizionamento esterni saranno registrati in un file.
I log verranno inseriti in Android/data/ch.opengis.qfield/filesQField/logs.
Note
Tieni presente che se il registro è sempre attivo, riempirà tutto lo spazio di archiviazione.
Posizione simulata¶
Lavoro sul campo
È possibile fornire una posizione simulata tramite un'applicazione Android indipendente da QField. Ci sono diverse opzioni per questo, una di queste è Android NTRIP Client.
Per utilizzarlo devi abilitare la posizione simulata nel tuo dispositivo Android.
Funzionalità posizionamento medio¶
Lavoro sul campo
Note
Il cursore delle coordinate deve essere bloccato sulla posizione corrente tramite il pulsante Blocca sulla posizione
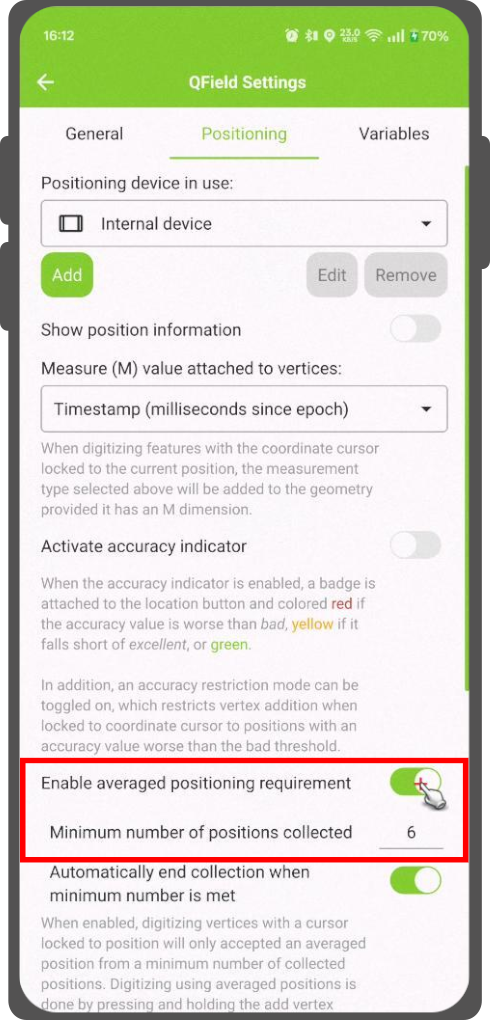
C'è una funzione che consente di digitalizzare utilizzando posizioni medie.
Il rilievo inizierà tenendo premuto il pulsante aggiungi vertice, che inizierà a raccogliere le posizioni.
Durante la raccolta, un indicatore apparirà sopra il cursore delle coordinate mostrando un testo che riflette il numero corrente di posizioni raccolte. Se è attivo un requisito minimo di conteggio delle posizioni medie, sarà presente anche una barra di avanzamento che indica l'avanzamento verso il rispetto di tale requisito.
Le impostazioni per attivare una soglia minima di conteggio per la posizione media si possono trovare nel pannello posizionamento delle impostazioni di QField. Quando attivo, non è necessario tenere premuto il pulsante di aggiunta vertice; una breve pressione sul pulsante inizierà la raccolta delle posizioni e aggiungerà automaticamente la posizione media non appena viene raggiunto il requisito del conteggio minimo.
Quando si utilizzano le variabili @gnss_* o @position_ su posizioni mediate, la variabile rappresenterà anche la media di tutti i campioni raccolti.
Configurazione del progetto¶
Preparazione da Desktop
Variabili di posizionamento¶
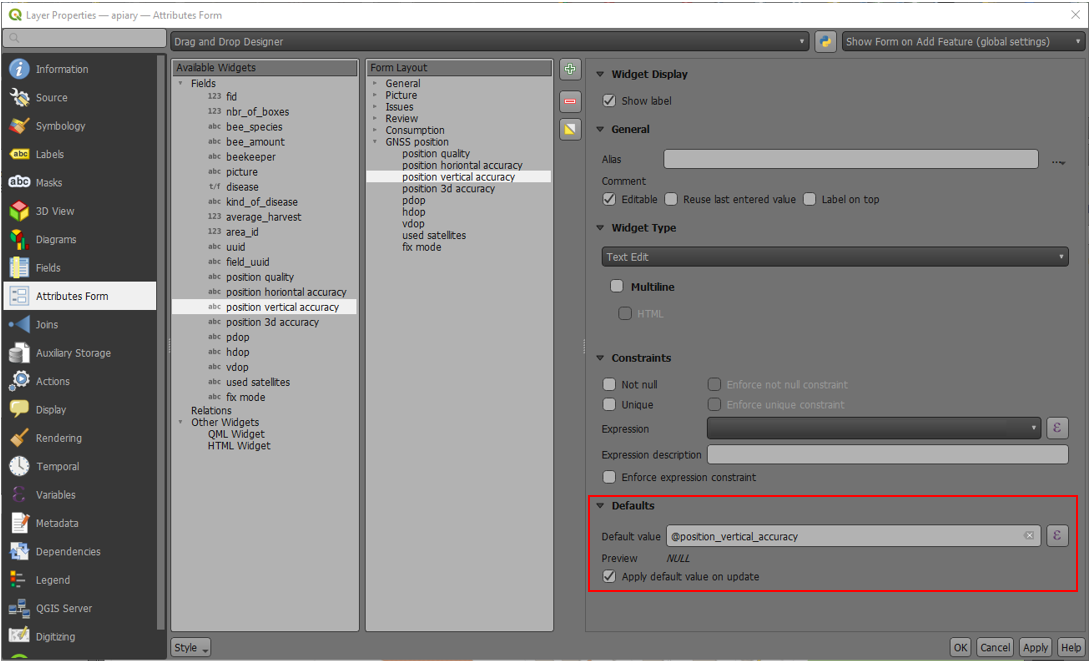
È possibile accedere alle informazioni di posizionamento tramite variabili di espressione aggiuntive accessibili nel modulo attributo. Queste saranno disponibili solo quando il posizionamento è abilitato.
These variables are commonly used as part of default values expressions for fields to keep track of the quality of individual measured points.
A common use case is recording the horizontal accuracy, which can be done by using the variable @position_horizontal_accuracy.
Another often used strategy is using the altitude of the current measurement which can be achieved with z(@position_coordinate).
For a complete listing of all available variables, refer to the expression variables reference documentation.
Informazioni per il valore Z GNSS con Traslazione verticale della griglia in uso: - Antenna height compensation=False
| Traslazione Verticale della Griglia in uso | point Z Value z(geometry) | GNSS Device z(@position_coordinate) | Display QField | Etichetta QField |
|---|---|---|---|---|
| Nessuna | Valore ellissoidale Z del dispositivo | Valore ellissoidale Z del dispositivo | Valore ellissoidale Z del dispositivo | Altitudine: xxx.xxxx m |
| Ortometrico da dispositivo | Valore ortometrico Z del dispositivo | Valore ortometrico Z del dispositivo | Valore ortometrico Z del dispositivo | Altitudine: xxx.xxxx m (orto.) |
| USER_Shift_Grid.GTX traslazione verticale della griglia |
Valore Z della griglia di spostamento | Valore ellissoidale Z del dispositivo | Valore Z della griglia di spostamento | Altitudine: xxx.xxxx m (griglia) |
Registratore di vertici¶
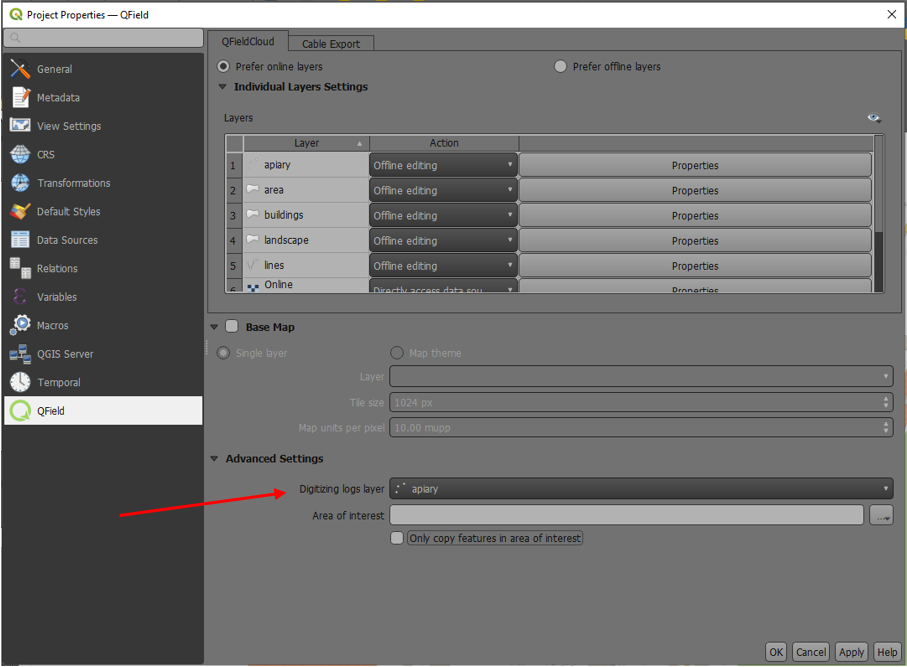
È possibile configurare un layer con i log dei vertici raccolti. Questo permette di tener traccia dei metadati di ogni vertice, come ad esempio gli attributi di qualità GNSS e altro. Per configurare questo, un layer di tipo punto va aggiunto al progetto e gli attributi configurati per registrare queste informazioni.
Poi dovresti assegnare il ruolo registratore di digitalizzazione ad un layer di punti.
Vai nel menu QFieldSync > Proprietà del progetto
Per essere più efficaci, gli attributi del layer dovrebbero avere valori predefiniti che si basano sulle variabili di posizionamento sopra elencate.