定位 (GNSS)¶
QField可以使用内置的GNSS (全球导航卫星系统,如GPS、格洛纳斯、伽利略或北斗)。QField还可以通过 NMEA streams over Bluetooth、TCP 或 UDP connection 连接到外部天线。
GNSS设备还能够测量地球表面上当前2D位置附近的高程。
可视化¶
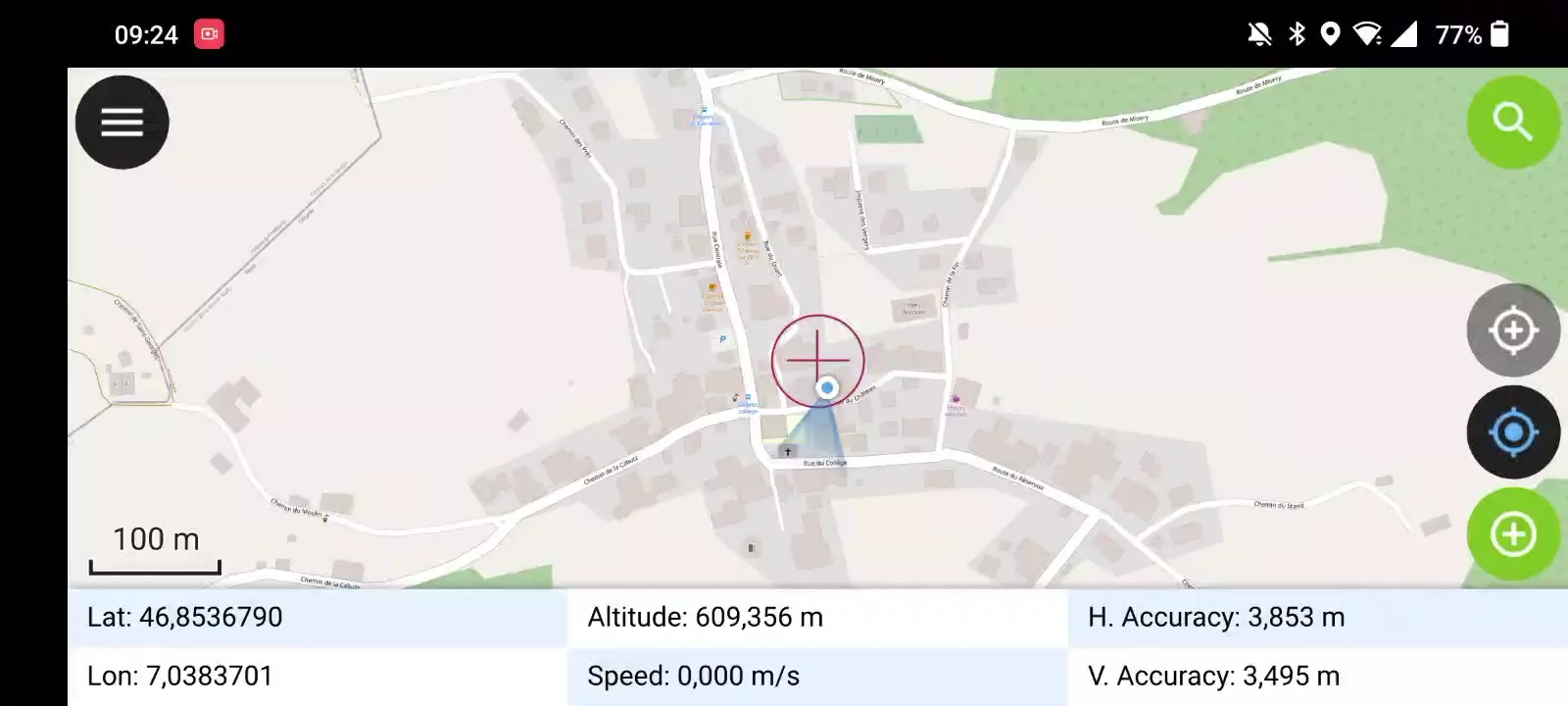
激活定位后,您的位置将在地图上显示为蓝色。如果静止不动,将显示为蓝色圆点;如果正在移动,则显示为指示移动方向的箭头。
如果设备具有内置指南针功能,蓝色信号射束表示设备的当前方向。
当前位置周围的圆圈表示定位设备报告的精度。
配置¶
QField设置的定位选项卡中提供了以下设置。
测量 (M) 值¶
将几何图形数字化到包含M维度的矢量图层时,每当坐标光标锁定到当前位置时,QField就会向各个顶点添加测量值。
默认情况下,该值将表示捕获位置的时间戳 (从Unix时间戳开始的毫秒数)。您可以使用设置的定位选项卡中的组合框更改此值。
可选择的可用值包括时间戳、对地速度、方位角、水平精度和垂直精度以及PDOP、HDOP和VDOP。
精度要求¶
可以定义所需最小测量精度。品质将报告为三个等级,即差 (红色)、良 (黄色) 和优 (绿色)。这些颜色显示在GNSS按钮顶部的一个点。
可以在设置的定位选项卡中定义阈值。
如果 启用精度限制模式 设置为激活状态,您将无法在坐标光标锁定到当前位置且精度值较差 (红色) 的情况下采集新的测量值。
天线高度修正¶
使用中的天线杆高度可在设置中定义。任何测量的海拔高度都将通过该值进行校正。
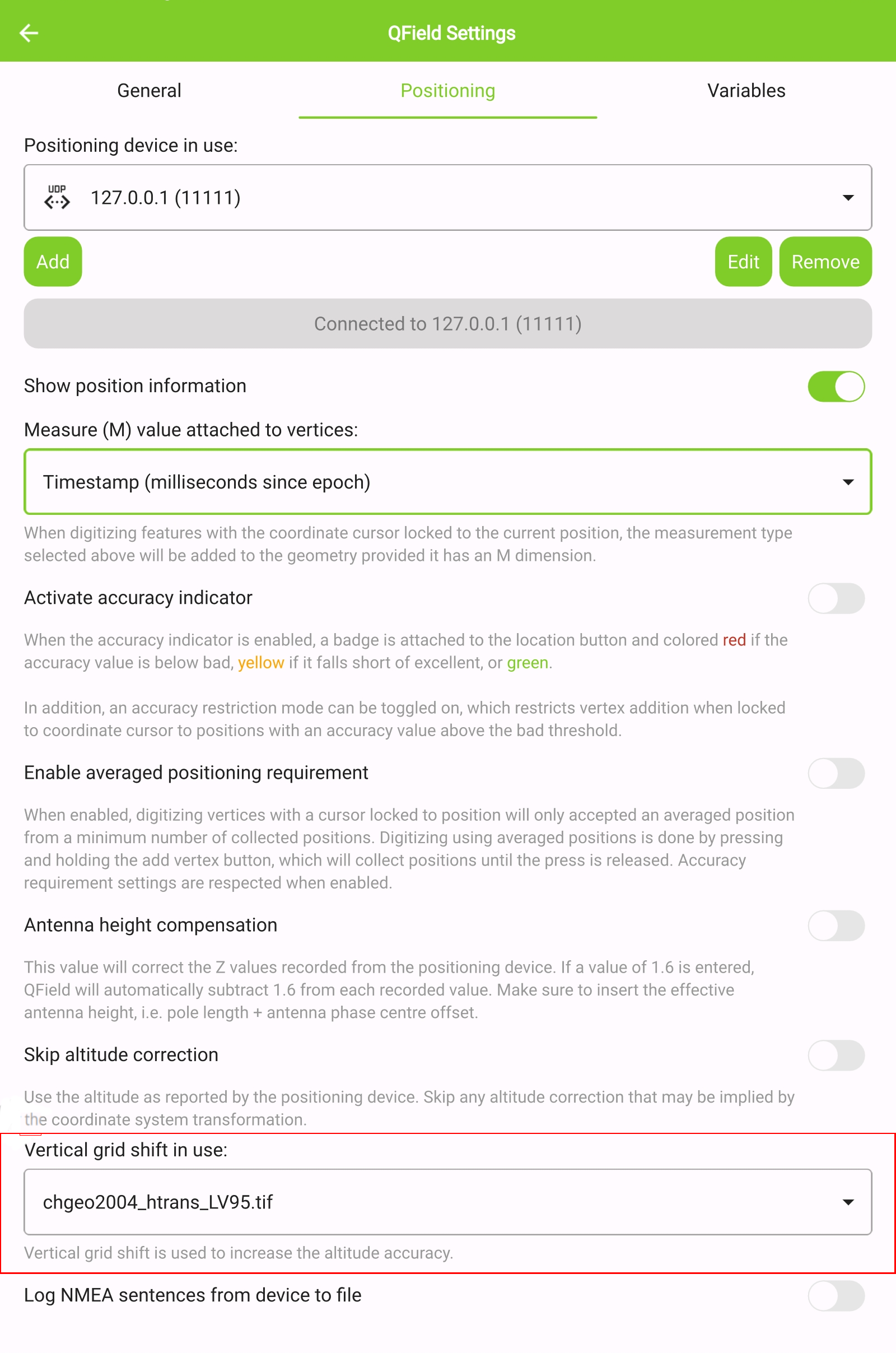
海拔校正/垂直网格偏移¶
海拔值可以用垂直网格偏移文件进行校正,以计算正交高度。
垂直网格偏移文件必须将其放入QField应用程序文件夹 <drive>:/Android/data/ch.opengis.qfield/files/QField/proj ,供QField使用。
一旦把网格偏移文件放到此处,将在QField中的 使用中的垂直网格偏移 下的 定位设置 可用。
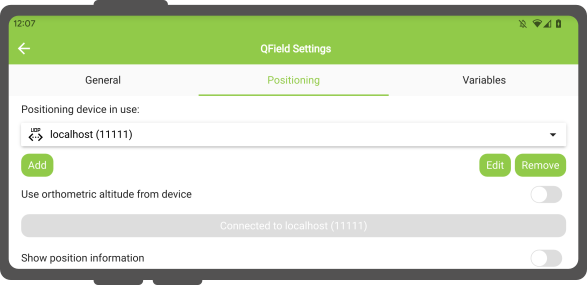
如果您正在使用海拔校正,并且使用了外部定位设备,请考虑关闭 使用设备的垂直海拔 。
当前支持的格式有:
- GeoTIFF (.tif, .tiff)
- NOAA Vertical Datum (.gtx)
- NTv2 Datum Grid Shift (.gsb)
- Natural Resources Canada's Geoid (.byn)
For example: For the transformation from ETRS89 (reference ellipsoid GPS) to NAP (Dutch) users can download the file nlgeo2018.gtx from NSGI and put it in the directory.
To obtain precise altitude data for Cadastral Surveying in Switzerland, users can access the file correction of the vertical grid shift through Geoid OGD from Swisstopo.
Following the download, users are advised to perform a conversion of the file labeled chgeo04_htrans_lv95.agr to chgeo04_htrans_lv95.gtx.
The QGIS processing algorithm gdal:translate (convert format) can be used for that.
用法¶
QField界面
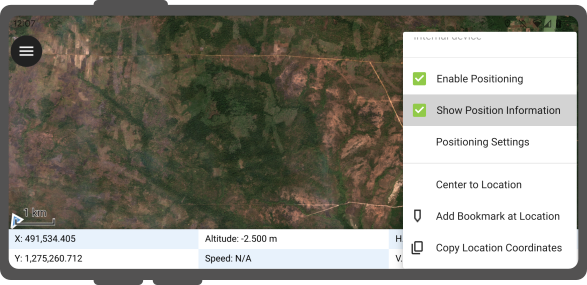
短按 GNSS按钮 打开GNSS,并在 定位信息 可用后将当前位置在屏幕居中显示。
激活 编辑模式 并按下目标按钮,中心的十字表示它正在使用GNSS定位。

长按 GNSS按钮 将显示 定位菜单 。
在 定位菜单 中,您可以打开 显示定位信息 ,显示重新投影到工程CRS的当前坐标以及精度信息。
笔记
如果您在工程CRS中看到 WGS 84 纬度/经度信息而不是就得信息,那么您可能设备没有信号。
使用外部GNSS接收机¶
QField界面
QField支持经由NMEA数据流通过蓝牙、TCP 或 UDP connections 连接到外部GNSS定位设备。
在 设置 > 定位 中,您可以找到一组用于添加、编辑或删除外部设备的按钮,以及一个用于在内部和保存的外部GNSS设备之间切换的下拉列表。
平台支持的连接细分如下:
| Android | iOS | Windows | Linux | MacOS | |
|---|---|---|---|---|---|
| 蓝牙 | * | ||||
| TCP | |||||
| UDP | |||||
| 串行端口 |
- (*) Windows的蓝牙支持通过操作系统连接到GNSS设备时自动创建的虚拟串行端口来实现。 *
The NMEA sentences currently supported are GGA, RMC, GSA, GSV, GST, VTG, HDG and HDT.
笔记
请确保没有其他类似模拟位置提供商的应用程序使用相同的连接。
外部接收器日志¶
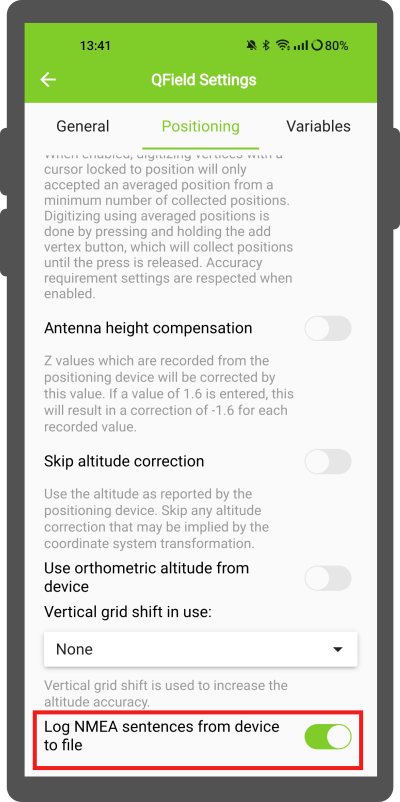
在 设置 > 定位 中,如果您选择了外部接收器作为定位设备,会发现一个开关 将日志NMEA语句从设备保存到文件 。如果此项被激活,所有来自外部定位设备的NMEA语句都将被记录到一个文件中。
日志将存放在 Android/data/ch.opengis.qfield/files/QField/logs 。
笔记
请注意,如果日志始终处于打开状态,将填满所有存储空间。
模拟位置¶
QField界面
可以通过不同的安卓应用程序向QField提供模拟位置。在此有几个选项,其中之一是 Android NTRIP 客户端 。
要使用此功能,您必须 在安卓设备上启用模拟位置 。
平均定位功能¶
QField界面
笔记
必须通过 锁定到位置按钮 将坐标光标锁定到当前位置
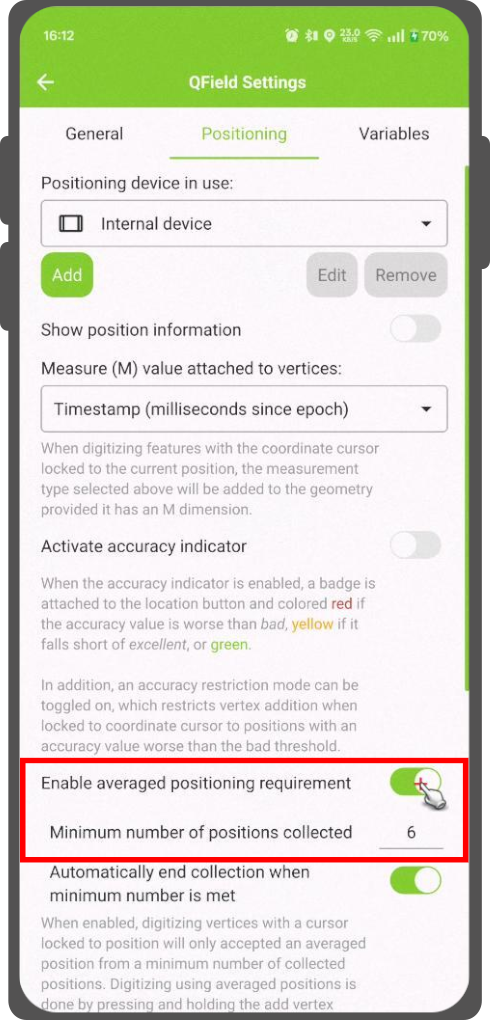
有一个功能允许您使用平均位置进行数字化。
按住添加顶点按钮开始测量,该按钮将开始收集位置信息。
收集时,坐标光标顶部会出现一个指示器,显示当前采集位置数量的文本。如果平均位置最小计数处于活动状态,还会出现进度条,提示达到该要求的进度。
可在QField设置的 定位 面板中找到激活平均位置最小计数阈值的设置。激活时,不需要按住添加顶点按钮,短按按钮开始收集位置,并在满足最小计数要求时自动添加平均位置。
在平均位置上使用 @gnss_* 或 @position_ variables 时,该变量还将表示所有收集样本的平均值。
工程配置¶
桌面端筹备工作
定位变量¶
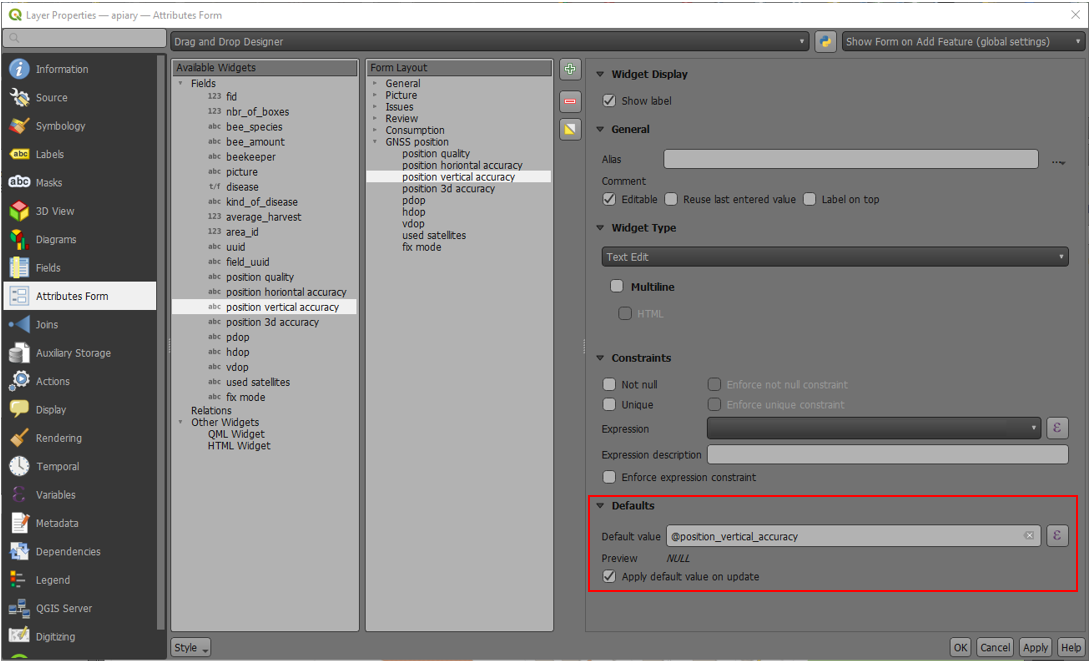
您可以通过属性表单可访问的其他表达式变量访问定位信息。这些变量仅在启用定位时可用。
These variables are commonly used as part of default values expressions for fields to keep track of the quality of individual measured points.
A common use case is recording the horizontal accuracy, which can be done by using the variable @position_horizontal_accuracy.
Another often used strategy is using the altitude of the current measurement which can be achieved with z(@position_coordinate).
For a complete listing of all available variables, refer to the expression variables reference documentation.
Information for GNSS Z value with Vertical grid shift in use: - Antenna height compensation=False
| Vertical Grid Shift in use | point Z Value z(geometry) | GNSS Device z(@position_coordinate) | QField Display | QField Label |
|---|---|---|---|---|
| None | Z ellipsoidal device value | Z ellipsoidal device value | Z ellipsoidal device value | Altitude: xxx.xxxx m |
| Orthometric from device | Z orthometric device value | Z orthometric device value | Z orthometric device value | Altitude: xxx.xxxx m (ortho.) |
| USER_Shift_Grid.GTX vertical grid shift |
Z shiftgrid value | Z ellipsoidal device value | Z shiftgrid value | Altitude: xxx.xxxx m (grid) |
顶点记录器¶
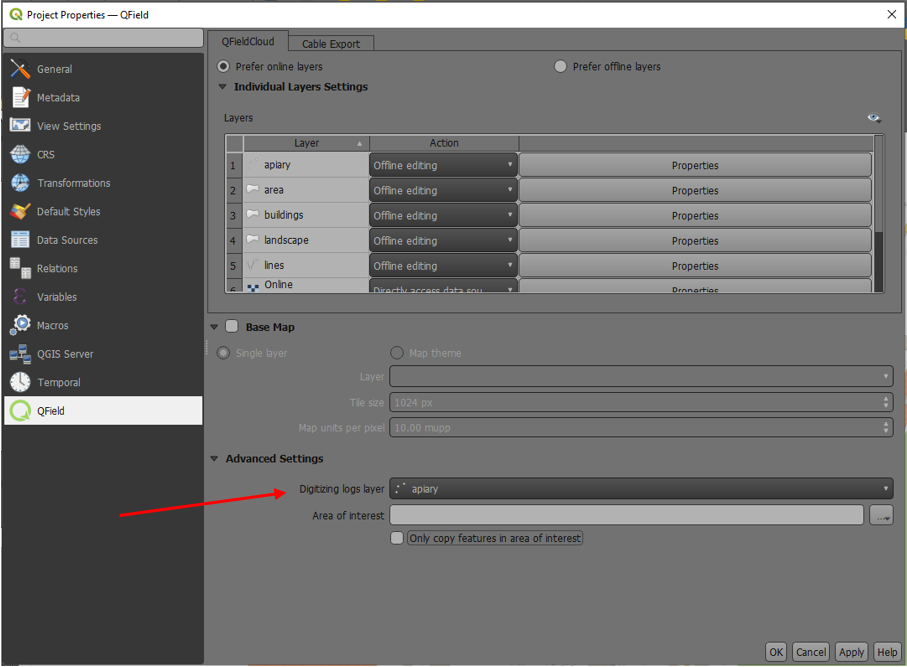
可以设置收集顶点的日志图层。这允许跟踪每个顶点的元数据,如GNSS品质属性等。要设置此项,可以将点图层添加到工程中,并配置用于存储此信息的属性。
然后,您应该分配角色 数字化记录器 给点图层。
转到 QFieldSync > 工程属性
为了获取最大效果,图层属性应该具有依赖于上面列举的定位变量的默认值。