Ortung (GNSS)¶
QField kann das interne GNSS (Global Navigation Satellite System, wie GPS, GLONASS, Galileo oder Beidou) nutzen. QField kann auch eine Verbindung mit externen Antennen durch NMEA-Streams über Bluetooth, TCP oder UDP Verbindung herstellen.
GNSS-Geräte sind in der Lage, neben der aktuellen 2D Position auf der Erdoberfläche auch die Höhe zu messen.
Visualisierung¶
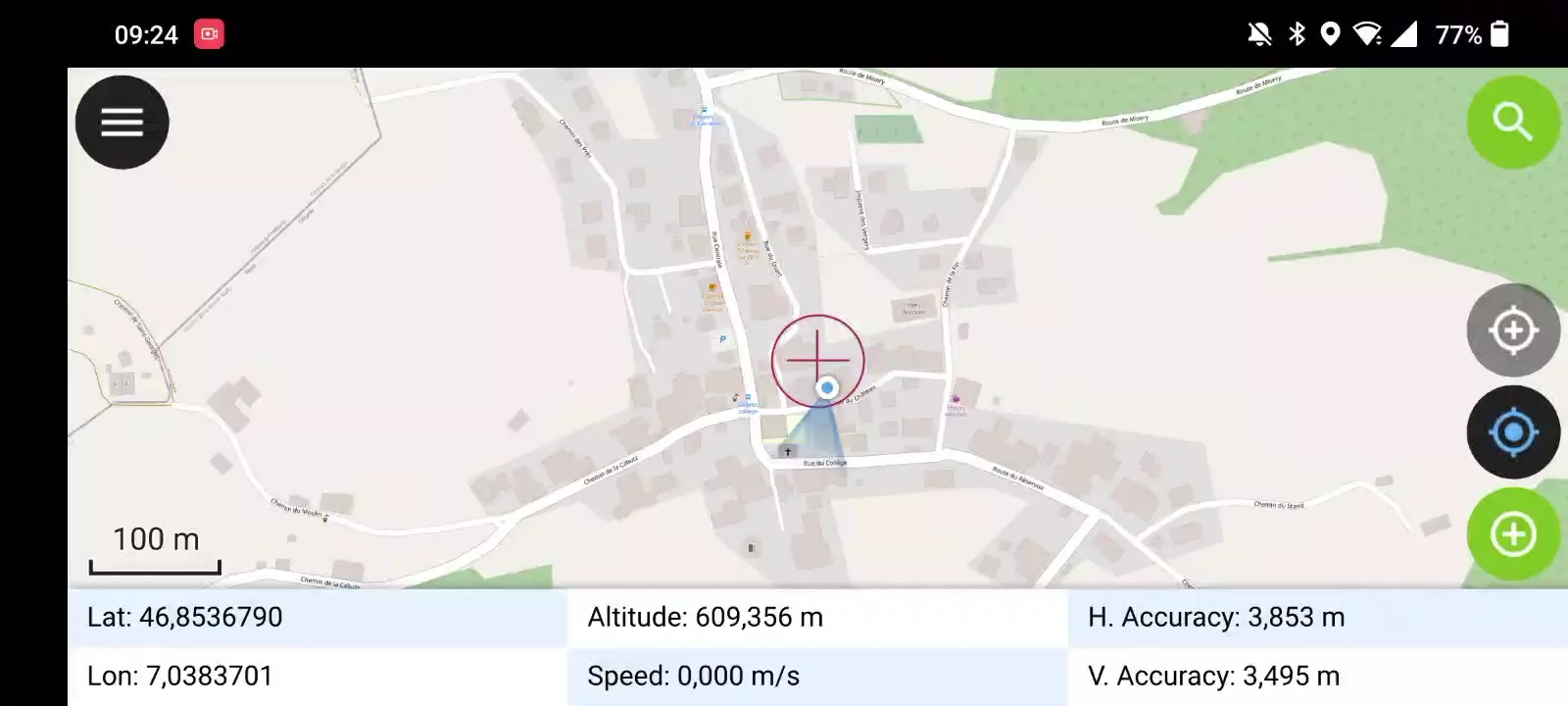
Wenn die Ortung aktiviert ist, wird Ihre Position in blauer Farbe auf der Karte angezeigt. Ihre Position ist entweder als blauer Punkt sichtbar, wenn Sie stillstehen, oder als Pfeil, der Ihre Bewegungsrichtung anzeigt wenn Sie sich bewegen.
Der blaue Strahl zeigt die aktuelle Ausrichtung Ihres Geräts an, wenn das Gerät über einen einen integrierten Magnetkompass verfügt.
Ein Kreis um die aktuelle Position zeigt die Genauigkeit an, die vom Ortungsgerät gemeldet wird.
Konfiguration¶
Die folgenden Einstellungen sind auf der Registerkarte "Positionierung" der QField-Einstellungen verfügbar.
Messung Wert (M)¶
Wenn eine Geometrie auf eine Vektorebene digitalisiert wird, die ein M-Wert enthält, fügt QField automatisch Messwerte zu einzelnen Knotenpunkten hinzu, wenn der Koordinatencursor an der aktuellen Position eingerastet ist.
Standardmäßig gibt der Wert den Zeitstempel der erfassten Position an (Millisekunden seit der letzten Messung). Sie können diesen Wert über das Kombinationsfeld auf der Registerkarte "Positionierung" der Einstellungen ändern.
Zur Auswahl stehen folgende Werte: Zeitstempel, Geschwindigkeit über Grund, Peilung, horizontale und vertikale Genauigkeit sowie PDOP, HDOP und VDOP.
Genauigkeitsanforderung¶
Es kann eine gewünschte Mindestgenauigkeit für Messungen festgelegt werden. Die Qualität wird in drei Klassen angegeben: schlecht (rot), ok (gelb) und ausgezeichnet (grün). Diese Farben werden als Punkt oben auf der GNSS-Schaltfläche angezeigt.
Die Schwellenwerte können auf der Registerkarte "Positionierung" der Einstellungen festgelegt werden.
Wenn die Einstellung Genauigkeitsanforderung aktivieren aktiviert ist, können Sie keine neuen Messungen durchführen, wenn der Koordinatencursor auf die aktuelle Position mit einem schlechten (roten) Genauigkeitswert fixiert ist.
Höhenausgleich der Antenne¶
Die Höhe des verwendeten Antennenstange kann in den Einstellungen festgelegt werden. Jede gemessene Höhe wird um diesen Wert korrigiert.
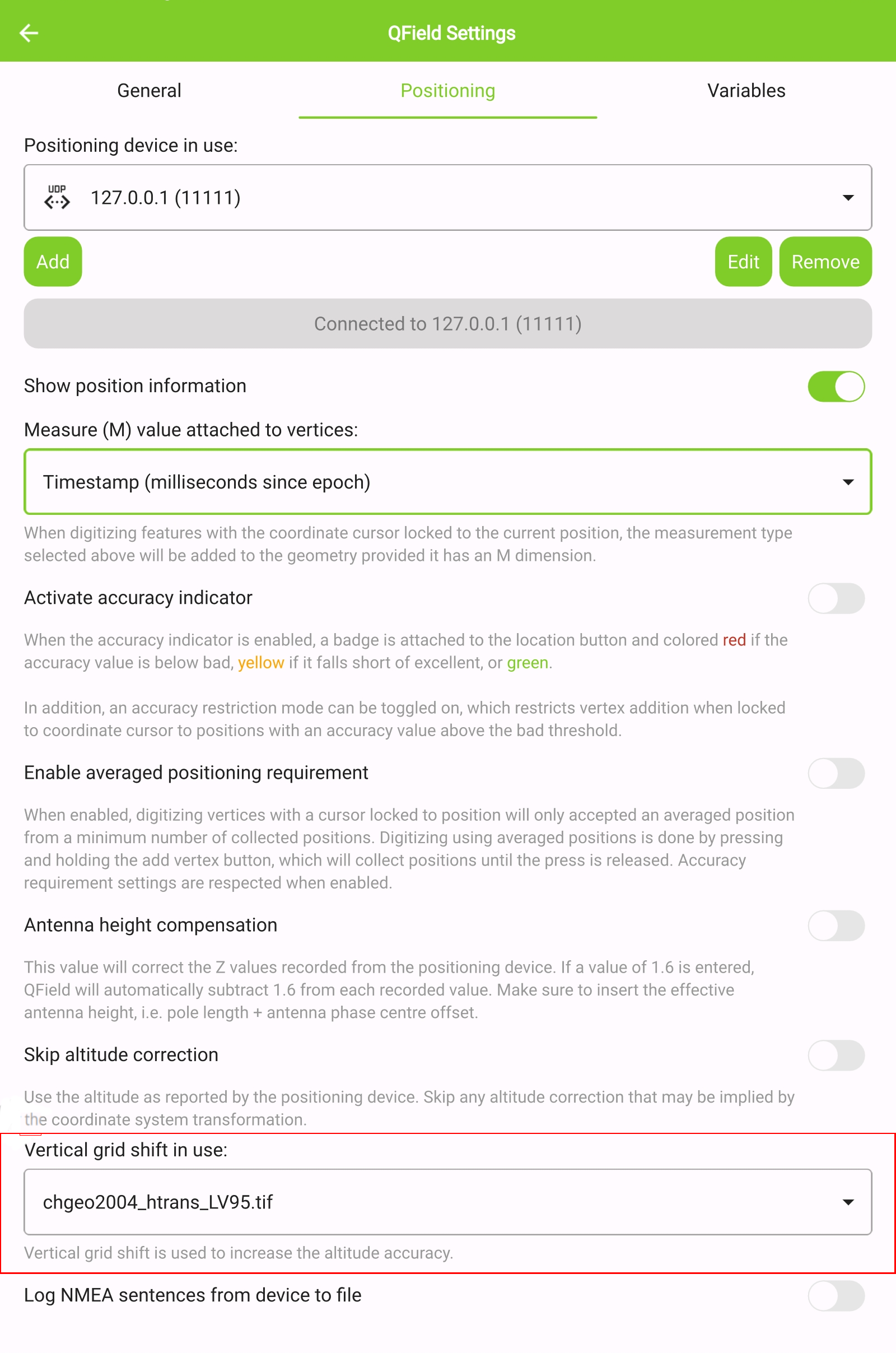
Höhenkorrektur / vertikale Gitterverschiebung¶
Die Höhenwerte können mit vertikalen Raster Grid Dateien korrigiert werden, um orthometrische Höhe zu berechnen.
Vertikale Rasterverschiebungsdateien (Geoid) müssen QField zur Verfügung gestellt werden, indem sie in den QField-App-Ordner gelegt werden <drive>:/Android/data/ch.opengis.qfield/files/QField/proj.
Sobald die Geoid-Datei dort platziert ist, ist sie in QField in den Positionierungseinstellungen unter Geoid in Gebrauch verfügbar.
Wenn Sie die Höhenkorrektur via Geoid verwenden und ein externes Positionierungsgerät eingesetzt wird, sollten Sie die Option Orthometrische Höhe vom Gerät verwenden deaktivieren.
Die aktuell unterstützten Dateiformate sind:
- GeoTIFF (.tif, .tiff)
- NOAA Vertical Datum (.gtx)
- NTv2 Datum Grid Shift (.gsb)
- Natural Resources Canada's Geoid (.byn)
Zum Beispiel: Für die Transformation von ETRS89 (Referenzellipsoid GPS) nach NAP (Niederländisch) kann man die Datei nlgeo2018.gtx von NSGI herunterladen und in das Verzeichnis legen.
Um genaue Höhendaten für die amtliche Vermessung in der Schweiz zu erhalten, kann die vertikale Korrektur-Datei über Geoid OGD von Swisstopo abgerufen werden. Nach dem Download wird empfohlen, die Datei chgeo04_htrans_lv95.agr in chgeo04_htrans_lv95.gtx zu konvertieren, wozu der QGIS-Verarbeitungsalgorithmus gdal:translate (convert format) verwendet werden kann.
Verwendung¶
Feldarbeit
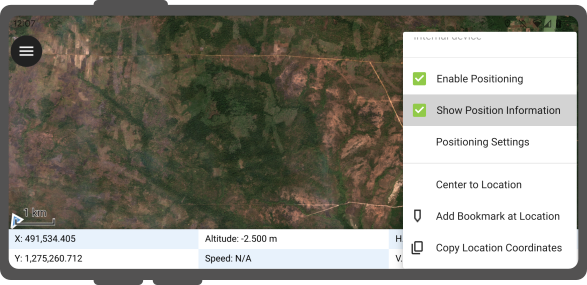
Ein kurzer Druck auf die GNSS-Schaltfläche schaltet das GNSS ein und zentriert die aktuelle Position, sobald die Positionsdaten verfügbar sind.
Aktivieren Sie den Bearbeitungsmodus und drücken Sie auf die Zieltaste. Das Kreuz in der Mitte bedeutet, dass die GNSS-Positionierung verwendet wird.

Ein langer Druck auf die GNSS-Schaltfläche zeigt das Positionierungsmenü an.
Im Menü Positionierung können Sie mit Positionsinformationen anzeigen die aktuellen Koordinaten, die in das Projekt-CRS reprojiziert werden, zusammen mit Präzisionsinformationen anzeigt.
Anmerkung
Wenn Sie WGS 84 lat/lon-Informationen anstelle von Informationen in Ihrem Projekt-KBS sehen, haben Sie wahrscheinlich noch kein Signal.
Verwendung eines externen GNSS Empfängers¶
Feldarbeit
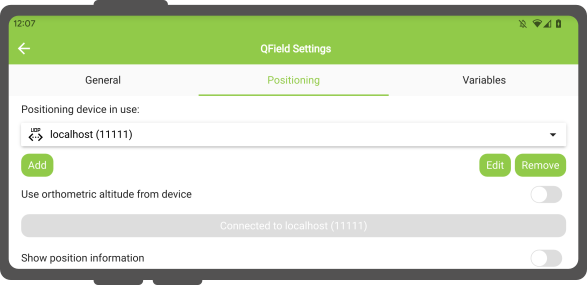
QField unterstützt die Verbindung zu externen GNSS-Positionierungsgeräten über NMEA-Streams durch Bluetooth-, TCP, oder UDP-Verbindungen.
Unter Einstellungen > Positionierung finden Sie eine Reihe von Schaltflächen zum Hinzufügen, Bearbeiten oder Löschen externer Geräte sowie eine Dropdown-Liste, um zwischen internen und gespeicherten externen GNSS-Geräten zu wechseln.
Zusammenfassung der Verbindungsmöglichkeiten nach Betriebssystem:
| Android | iOS | Windows | Linux | MacOS | |
|---|---|---|---|---|---|
| Bluetooth | * | ||||
| TCP | |||||
| UDP | |||||
| Serieller Anschluss |
(*) Die Bluetooth-Unterstützung unter Windows erfolgt über die virtuelle serielle Schnittstelle, die das Betriebssystem automatisch erstellt, wenn es eine Verbindung zum GNSS-Gerät herstellt.
Die derzeit unterstützten NMEA-Sätze sind GGA, RMC, GSA, GSV, GST, VTG, HDG und HDT.
Anmerkung
Vergewissern Sie sich, dass keine andere Anwendung wie z. B. ein Mocking Location Provider die gleiche Verbindung verwendet.
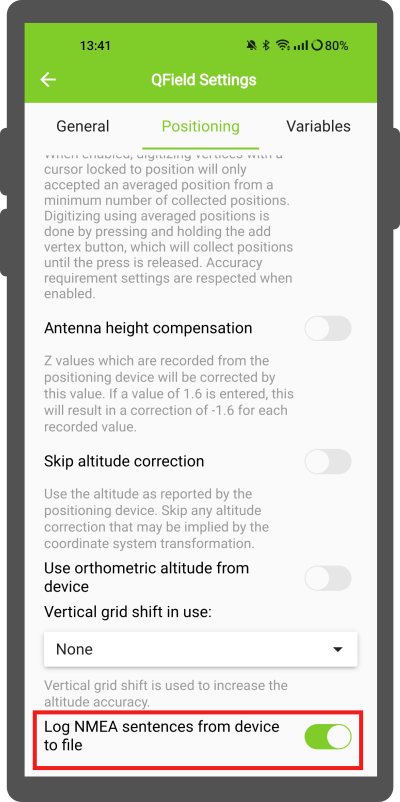
Externes Empfängerprotokoll¶
Wenn Sie einen externen Empfänger als Ortungsgerät ausgewählt haben, finden Sie unter Einstellungen > Positionierung den Schalter ''NMEA-Sätze vom Gerät in Datei protokollieren''. Wenn dies aktiviert ist, werden alle NMEA-Sätze, die von externen Ortungsgeräten kommen, in einer Datei aufgezeichnet.
Die Protokolle werden in Android/data/ch.opengis.qfield/files/QField/logs gespeichert.
Anmerkung
Beachten Sie, dass das Protokoll, wenn es immer eingeschaltet ist, den Speicherplatz immer weiter füllt.
Mock/Schein-Standort¶
Feldarbeit
Es ist möglich, QField einen Scheinstandort über eine separate Android-App zur Verfügung zu stellen. Hierfür gibt es mehrere Optionen, eine davon ist der [Android NTRIP Client].(https://play.google.com/store/apps/details?id=com.lefebure.ntripclient).
Um dies zu nutzen, müssen Sie [Mock Locations auf Ihrem Android-Gerät aktivieren].(https://www.youtube.com/watch?v=v1eRHmMiRJQ).
Mittlere Positionierungs-Option¶
Feldarbeit
Anmerkung
Der Koordinatencursor muss über die Schaltfläche [Auf Position halten] an der aktuellen Position eingerastet werden.(./digitize.md#adding-point-features)
Es gibt eine Funktion, mit der Sie mit gemittelten Positionen digitalisieren können.
Die Aufnahme beginnt mit dem Drücken und Halten der Taste "Scheitelpunkt hinzufügen", wodurch die Erfassung der Positionen beginnt.
Während der Aufnahme erscheint über dem Koordinatencursor eine Anzeige mit einem Text, der die aktuelle Anzahl der gesammelten Positionen anzeigt. Wenn eine Mindestanzahl an gemittelten Positionen erforderlich ist, erscheint ein Fortschrittsbalken, der den Verlauf anzeigt.
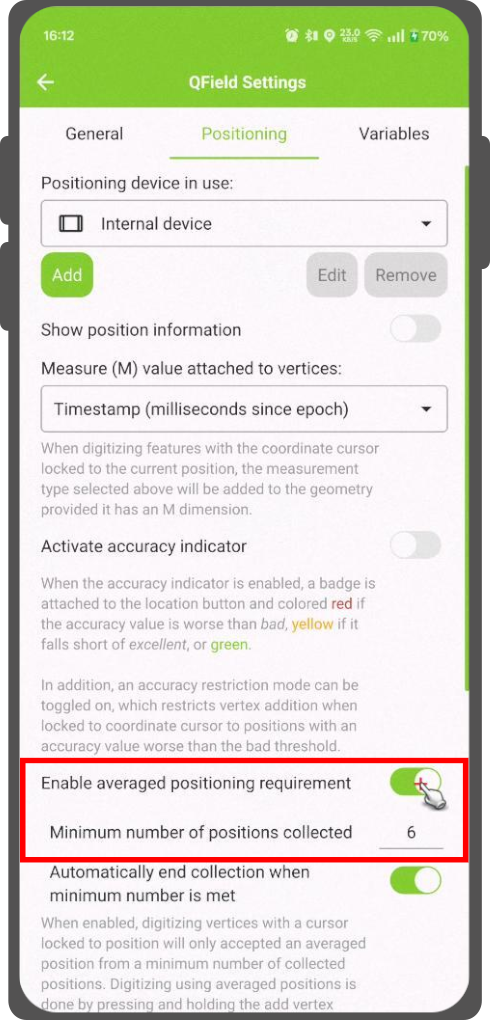
Die Einstellung zum Aktivieren einer Mindestanzahl von Durchschnittspositionen befindet sich in den QField-Einstellungen unter Positionierung. Wenn sie aktiviert ist, ist es nicht erforderlich, die Schaltfläche zum Hinzufügen von Scheitelpunkten gedrückt zu halten; ein kurzes Antippen der Schaltfläche beginnt mit der Messung von Positionen und fügt automatisch die gemittelte Position hinzu, wenn die Mindestanzahl erfüllt ist.
Bei der Verwendung von @gnss_*- oder @position_-Variablen für gemittelte Positionen stellt die Variable auch den Durchschnitt über alle gesammelten Werte dar.
Projektkonfiguration¶
Vorbereitung am Schreibtisch
Positionierungsvariablen¶
Du hast Zugriff auf die Positionierungsinformationen über zusätzliche Ausdrucksvariablen, die im Attributformular zugänglich sind. Diese sind nur verfügbar, wenn die Positionierung aktiviert ist.
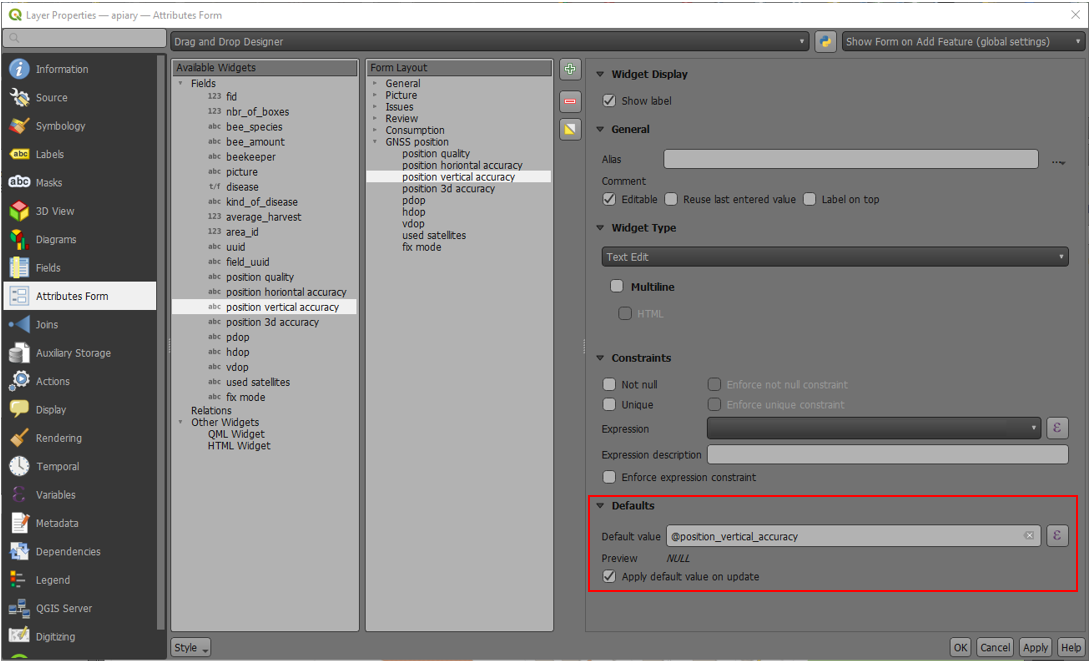
Diese Variablen werden üblicherweise als Teil von Standardwerte-Ausdrücken für Felder verwendet, um die Qualität der einzelnen Messpunkte zu dokumentieren.
Häufig soll die horizontale Genauigkeit für einen Messpunkt aufgenommen werden. Dies kann mit der Variablen @position_horizontal_accuracy ausgeführt werden.
Auch die Höhe wird häufig benötigt und kann mit der Variablen z(@position_coordinate) aufgenommen werden.
Eine komplette Liste aller verfügbaren Variablen findet man unter Ausdrucksvariable Dokumentation.
Informationen zum GNSS-Z-Wert bei Verwendung eines Geoids: - Antennenhöhenausgleich=False
| Geoid wird genutzt | Punkt Z Wert z(geometry) | GNSS-Gerät z(@position_coordinate) | QField Anzeige | QField Label |
|---|---|---|---|---|
| None | Z ellipsoider Wert vom Gerät | Z ellipsoider Wert vom Gerät | Z ellipsoider Wert vom Gerät | Höhe: xxx.xxxx m |
| Orthometrische Höhe des Geräts | Z Orthometrische Höhe des Geräts | Z Orthometrische Höhe des Geräts | Z Orthometrische Höhe des Geräts | Höhe: xxx.xxxx m (ortho.) |
| USER_Shift_Grid.GTX (Geoid) vertical grid shift |
Z Geoid-Wert | Z ellipsoider Wert vom Gerät | Z Geoid-Wert | Höhe: xxx.xxxx m (grid) |
Vertex Logger¶
Es ist möglich, eine Log-Ebene für die gesammelten Vertices einzurichten. Dies ermöglicht es, Metadaten für jeden Vertex wie GNSS-Qualitätsattribute und mehr zu speichern. Um dies einzurichten, kann dem Projekt eine Punktebene hinzugefügt und die Attribute zum Speichern dieser Informationen konfiguriert werden.
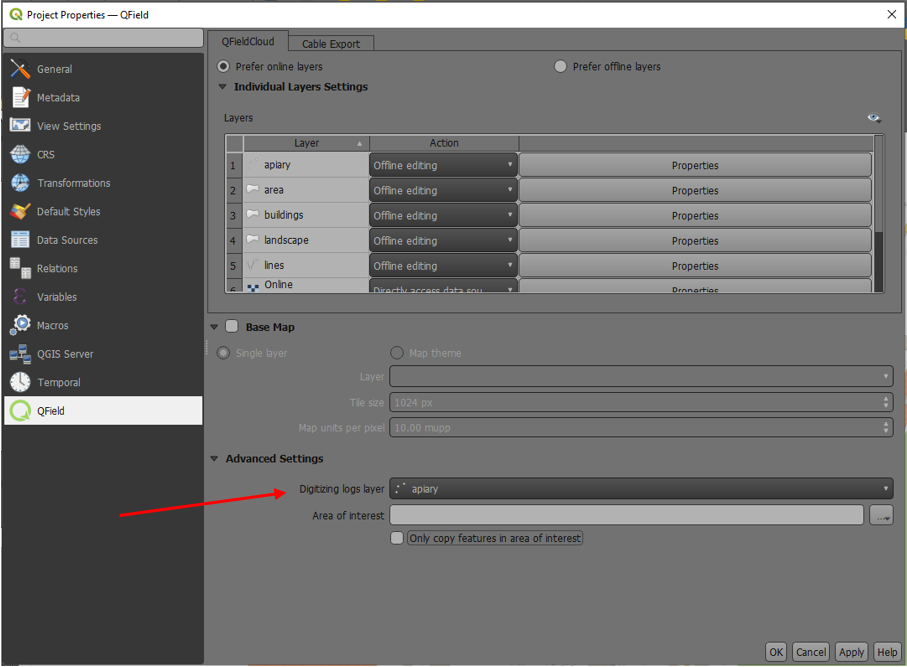
Dann sollten Sie einem Punkt-Layer die Rolle Digitalisierungslogger zuweisen.
Gehe zu QFieldSync > Projekt Einstellungen
Um möglichst effektiv zu sein, sollten die Layerattribute Standardwerte haben, die sich auf die oben aufgezählten Positionsvariablen stützen.