Posicionamento (GNSS)¶
O Qfield consegue usar o sistema interno GNSS (Sistemas de Satélites Globais de Navegação, como GPS, GLONASS, Galileo ou Beidou). QField também consegue ligar a antenas externas através de NMEA usando ligações Bluetooth, TCP, ou UDP.
Dispositivos GNSS são também capazes de medir a altitude perto da posição 2D atual na superfície da terra.
Visualização¶
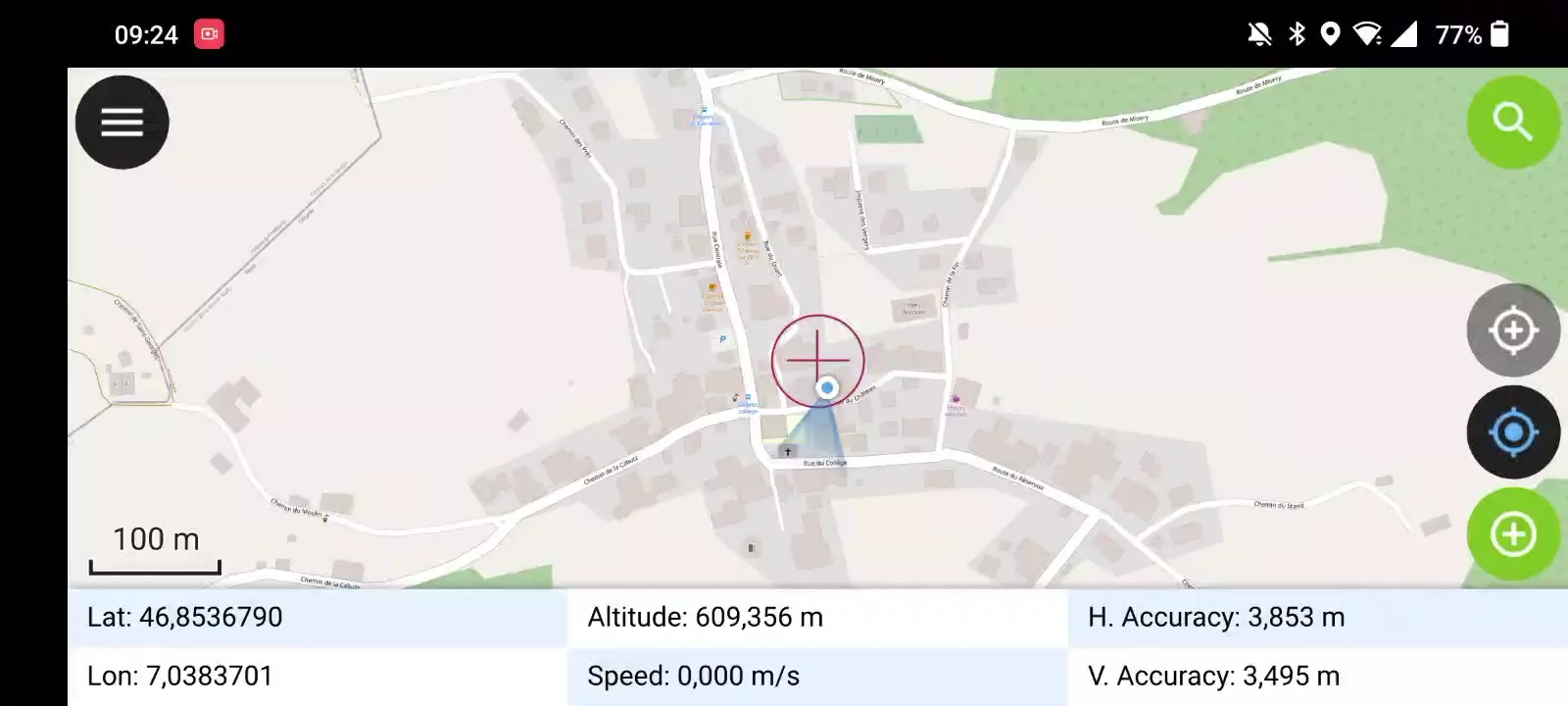
Quando o posicionamento estiver ativado, a sua posição será mostrada com a cor azul no mapa. A sua localização é visível como um ponto azul se você estiver parado ou como uma seta a indicar a direção do seu movimento se estiver a movimentar.
O raio azul indica a orientação atual do seu dispositivo se o seu dispositivo tiver um compasso magnético interno.
Um círculo à volta da posição atual indica a precisão reportada pelo dispositivo de posicionamento.
Configuração¶
As configurações seguintes encontram-se disponíveis no separador Posicionamento das configurações do QField.
Mede o valor (M)¶
Ao digitalizar uma geometria numa camada vetorial que contém uma dimensão M, o QField adicionará um valor de medição aos vértices individuais sempre que o cursor de coordenadas está bloqueado na posição atual.
Por padrão, o valor representará o timestamp da posição capturada (milissegundos desde Epoch). Podes alterar este valor com a caixa de valores no separador de posicionamento das configurações.
Os valores disponíveis para escolha são data/hora, velocidade, orientação, precisão horizontal e precisão vertical, bem como PDOP, HDOP e VDOP.
Requirimentos de precisão¶
Uma precisão mínima desejada para medições pode ser definida. A qualidade será relatada em três classes, mau (vermelho), ok (amarelo) e excelente (verde). Estas cores aparecerão como um ponto no topo do botão GNSS.
Os limites podem ser definidos no separador do posicionamento nas configurações.
Se a configuração Ativar requisito de precisão estiver ativada, não poderá recolher novas medições com o cursor bloqueado na posição atual com um valor precisão baixo (vermelho).
Compensação da altura da antena¶
A altura do poste da antena em uso pode ser definido nas configurações. Qualquer altitude medida irá ser corrigida por este valor.
Correção de altitude / grelha de transformação vertical¶
Os valores de altitude podem ser corrigidos com ficheiros de grelhas de transformação vertical para calcular a altura ortométrica.
Os ficheiros de grelhas de transformação vertical ficam disponíveis no QField colocando-as na pasta da app do QField <drive>:/Android/data/ch.opengis.qfield/files/QField/proj.
Quando o ficheiro da grelha de deslocamento é colocado lá, ele fica disponível no QField nas Definições de Posicionamento em Deslocamento vertical da grelha em uso.
Se estás a usar correção de altitude e um dispositivo externo de localização está em uso, considera desligar Utilize a altitude ortométrica do dispositivo.
Os formatos atualmente suportados são:
- GeoTIFF (.tif, .tiff)
- NOAA Vertical Datum (.gtx)
- NTv2 Datum Grid Shift (.gsb)
- Natural Resources Canada's Geoid (.byn)
For example: For the transformation from ETRS89 (reference ellipsoid GPS) to NAP (Dutch) users can download the file nlgeo2018.gtx from NSGI and put it in the directory.
To obtain precise altitude data for Cadastral Surveying in Switzerland, users can access the file correction of the vertical grid shift through Geoid OGD from Swisstopo.
Following the download, users are advised to perform a conversion of the file labeled chgeo04_htrans_lv95.agr to chgeo04_htrans_lv95.gtx.
The QGIS processing algorithm gdal:translate (convert format) can be used for that.
Utilização¶
Trabalho de campo
Um toque no botão de GNSS irá ligar o GNSS e centrar o mapa na localização atual assim que a informação de localização se encontrar disponível.
Ativar o modo de edição e pressionar no botão do alvo, a cruz no centro significa que estás a usar a localização GNSS.

Um toque longo no botão GNSS irá mostrar o menu de posicionamento.
No menu do posicionamento podes ligar Mostrar a informação da posição que irá apresentar as coordenadas atuais que serão reprojetadas para o SRS acompanhas de informações sobre precisão.
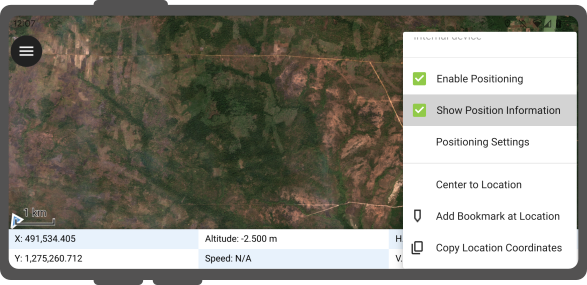
Nota
Se vês informação WGS 84 lat/lon ao invés da informação do SRS do teu projeto, provavelmente ainda não tens sinal.
Usar um Receptor externo GNSS¶
Trabalho de campo
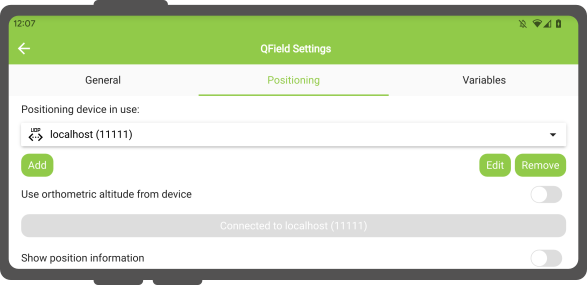
O QField suporta a ligação com dispositivos de posicionamento GNSS externos via NMEA através de Bluetooth, TCP, ou conexões UDP.
Nas Definições > Posicionamento, podes encontrar um conjunto de botões para adicionar, editar ou apagar dispositivos externos, bem como uma lista para alternar entre os dispositivos GNSS internos e externos gravados.
O tipo de ligações suportadas por plataforma é a seguinte:
| Android | iOS | Windows | Linux | MacOS | |
|---|---|---|---|---|---|
| Bluetooth | * | ||||
| TCP | |||||
| UDP | |||||
| Porta de série |
() O suporte Bluetooth no Windows ocorre automaticamente através da porta virtual criado pelo sistema operativo quando se liga ao dispositivo GNSS.*
The NMEA sentences currently supported are GGA, RMC, GSA, GSV, GST, VTG, HDG and HDT.
Nota
Certifique-se que não tem outra aplicação com fornecedores de mock location a usar a mesma ligação.
External receiver log¶
In Settings > Positioning if you have selected an external receiver as the positioning device, you will find a switch Log NMEA sentences from device to file. If this is activated, all NMEA sentences coming from external positioning devices will be logged to a file.
The logs will be placed in Android/data/ch.opengis.qfield/files/QField/logs.
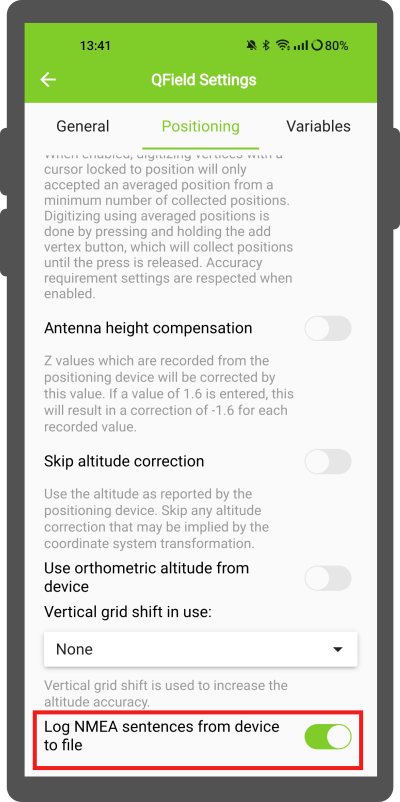
Note
Be aware that if the log is always turned on, it will fill up all the storage.
Localização simulada¶
Trabalho de campo
É possível fornecer um mock location através de uma aplicação Android que é separado do QField. Existem várias opções para isso, uma delas é Android NTRIP Client.
Para usar este opção terá de ativar mock locations no dispositivo Android.
Funcionalidade de cálculo de posicionamento médio¶
Trabalho de campo
Note
The coordinate cursor must be locked to the current location via the Lock to position button
Existe uma função que permite digitalizar usando o cálculo de posições médias.
O levantamento começará pressionando e segurando o botão de adicionar vértice, que começará a recolher posições.
While collecting, an indicator will appear on top of the coordinate cursor showing a text reflecting the current number of collected positions. If an averaged position minimum count requirement is active, a progress bar will also be present indicating the progress towards meeting that requirement.
The setting to activate an average position minimum count threshold can be found in QField settings's positioning panel. When active, holding the add vertex button is not required, a short tap on the button will begin the collection of positions and automatically add the averaged position when the minimum count requirement is met.

When using @gnss_* or @position_ variables on averaged positions, the variable will also represent the average over all collected samples.
Configuração de projeto¶
Preparação no Desktop
Variáveis de posicionamento¶
You can get access to positioning information through additional expression variables accessible in the attribute form. These will only be available when positioning is enabled.
These variables are commonly used as part of default values expressions for fields to keep track of the quality of individual measured points.
All @position_* variables have a corresponding @gnss_* variable.
The gnss variables always report the gnss sensor values, even when the crosshair is not snapped.
@position_source_name- The name of the device that gave location information as reported by the sensor. To differenciate between internal and external sensor. If the position is manually set, and the position is not snapped to the cursor, the source name is "manual". In case the cursor is not snapped to the position, all other variables will be null, if you need this, use thegnss_variables instead.@position_quality_description- A human readable and translated string for the quality as reported by the sensor. E.g. "Fixed RTK". It is only available when the crosshair is snapped to the sensor. - IE@position_coordinate- A point with the coordinate in WGS84. Lon, Lat, Altitude as delivered by the sensor. It is only available when the crosshair is snapped to the sensor. -x(@position_coordinate)- IE@position_horizontal_accuracy- The horizontal accuracy of the coordinate (in meters) as reported by the sensor. It is only available when the crosshair is snapped to the sensor. - IE@position_timestamp- The timestamp of the position in UTC as reported by the sensor. It is only available when the crosshair is snapped to the sensor. - IE@position_direction- The direction of movement in degrees from true north as reported by the sensor. It is only available when the crosshair is snapped to the sensor. - IE@position_orientation- Orientation of the device itself, regardless of its movement. It changes as the device is rotated relative to true north (from 0° to 359°).@position_ground_speed- Groundspeed (in m/s) as reported by the sensor. It is only available when the crosshair is snapped to the sensor. - IE@position_magnetic_variation- The angle between the horizontal component of the magnetic field and true north, in degrees as reported by the sensor. Also known as magnetic declination. A positive value indicates a clockwise direction from true north and a negative value indicates a counter-clockwise direction. It is only available when the crosshair is snapped to the sensor. - IE@position_vertical_accuracy- The vertical accuracy of the coordinate (in meters) as reported by the sensor. It is only available when the crosshair is snapped to the sensor. - IE@position_3d_accuracy- The 3 dimensional accuracy of the coordinate (in meters), 3D-RMS as reported by the sensor. It is only available when the crosshair is snapped to the sensor. - IE@position_vertical_speed- The vertical speed (in m/s) as reported by the sensor. It is only available when the crosshair is snapped to the sensor. - IE@position_averaged_count- This variable holds the number of collected positions from which an averaged position was calculated when digitizing in this mode. For non-averaged positions, the value will be set to0(zero). - IE@position_pdop- Position dilution of precision as reported by the sensor. It is only available when the crosshair is snapped to the sensor. - E@position_hdop- Horizontal dilution of precision as reported by the sensor. It is only available when the crosshair is snapped to the sensor. - E@position_vdop- Vertical dilution of precision as reported by the sensor. It is only available when the crosshair is snapped to the sensor. - E@position_number_of_used_satellites- Number of satellites as reported by the sensor. It is only available when the crosshair is snapped to the sensor. - IE@position_used_satellites- A list of satellites in use (pri) as reported by the sensor. It is only available when the crosshair is snapped to the sensor. -array_to_string(array_foreach(@position_used_satellites, @element), ', ')- E@position_fix_status_description- The GPS Fix Status "NoData", "NoFix", "Fix2D" or "Fix3D" as reported by the sensor. It is only available when the crosshair is snapped to the sensor. - E@position_fix_mode- Fix mode (where "M" = Manual, forced to operate in 2D or 3D or "A" = Automatic, 3D/2D) as reported by the sensor. It is only available when the crosshair is snapped to the sensor. - E
Info
- I: Internal position source E: External (NMEA) position source.
- Variables that contain
satellitesare not available on iOS.
- Exemplos:
-
- when the crosshair is snapped to the sensor -
@gnss_horizontal_accuracy> The horizontal accuracy of the coordinate (in meters) as reported by the sensor. -@position_horizontal_accuracy> The horizontal accuracy of the coordinate (in meters) as reported by the sensor. -@position_source_name--> sensor name. - when the crosshair is manually moved -
@gnss_horizontal_accuracy> The horizontal accuracy of the coordinate (in meters) as reported by the sensor. -@position_horizontal_accuracy> The value isNULL. -@position_source_name> The value ismanual.
- when the crosshair is snapped to the sensor -
Information for GNSS Z value with Vertical grid shift in use: - Antenna height compensation=False
| Vertical Grid Shift in use | point Z Value z(geometry) | GNSS Device z(@position_coordinate) | QField Display | QField Label |
|---|---|---|---|---|
| None | Z ellipsoidal device value | Z ellipsoidal device value | Z ellipsoidal device value | Altitude: xxx.xxxx m |
| Orthometric from device | Z orthometric device value | Z orthometric device value | Z orthometric device value | Altitude: xxx.xxxx m (ortho.) |
| USER_Shift_Grid.GTX vertical grid shift |
Z shiftgrid value | Z ellipsoidal device value | Z shiftgrid value | Altitude: xxx.xxxx m (grid) |
Vertex logger¶
It is possible to setup a log layer of the collected vertices. This allows to keep track of meta data for each vertex like GNSS quality attributes and more. To set this up, a point layer can be added to the project and attributes configured to store this information.
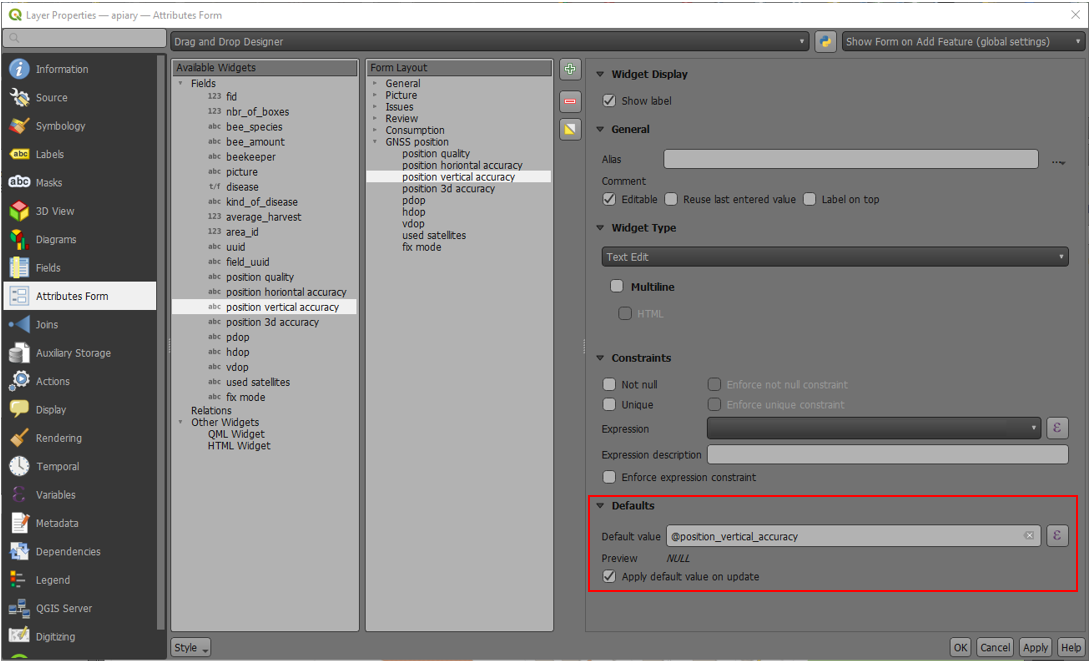
Depois o utilizador associa a função de registo de digitalização numa camada de pontos.
Vá a QFieldSync --> Propriedades do projeto
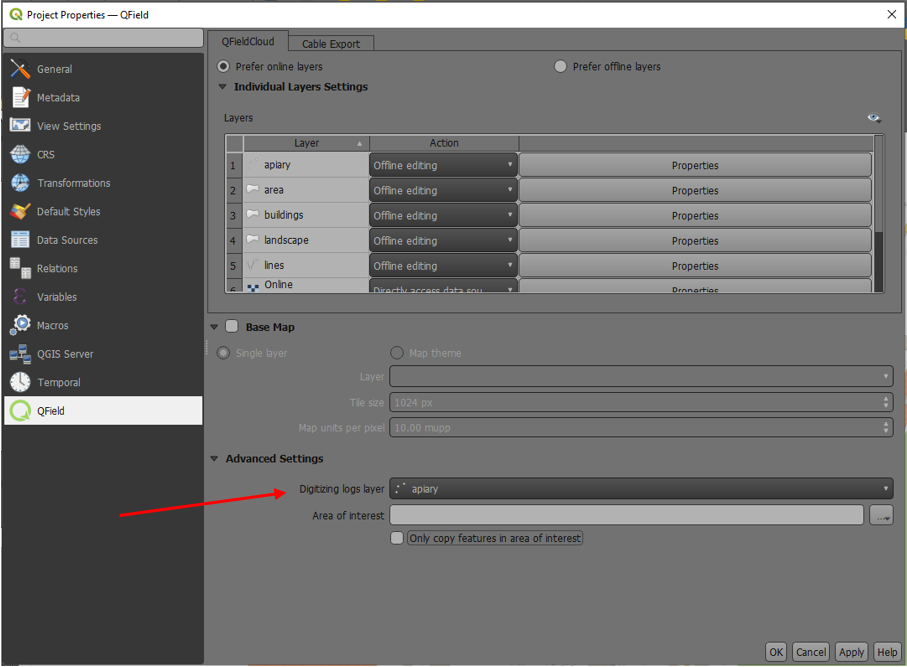
Para serem mais eficaz, os atributos da camada devem ter valores padrão que dependem das variáveis de posicionamento que foram enumeradas acima.