Paikannus (GNSS)¶
QField can make use of the internal GNSS (Global Navigation Satellite System, like GPS, GLONASS, Galileo or Beidou). QField can also connect to external antennas through NMEA streams over Bluetooth, TCP, or UDP connection.
GNSS-laitteet pystyvät myös mittaamaan korkeuden nykyisen 2D-sijainnin vieressä maan pinnalla.
Visualisointi¶
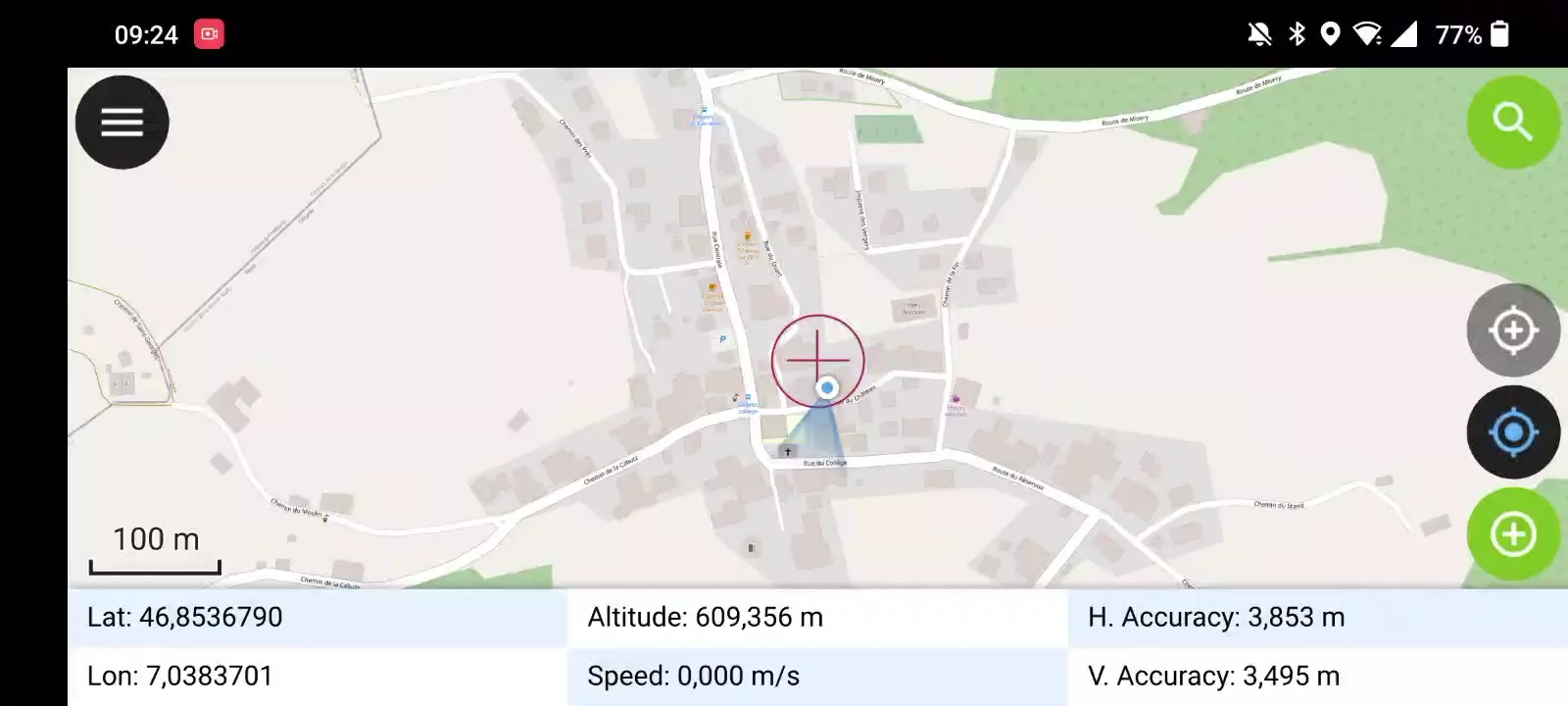
Kun paikannus on aktivoitu, sijaintisi näkyy kartalla sinisenä. Sijaintisi näkyy joko sinisenä pisteenä, jos olet paikallaan, tai nuolena, joka ilmaisee liikesuunnan, jos olet liikkeessä.
Sininen säde osoittaa laitteesi nykyisen suunnan, jos laitteessa on sisäänrakennettu magneettinen kompassi.
Ympyrä nykyisen sijaintisi ympärillä osoittaa paikannuslaitteen ilmoittaman tarkkuuden.
Määritys¶
The following settings are available in QField settings' positioning tab.
Mittaa (M) arvo¶
When digitizing a geometry onto a vector layer that contains an M dimension, QField will add a measurement value to individual vertices whenever the coordinate cursor is locked to the current position.
By default, the value will represent the captured position's timestamp (milliseconds since epoch). You can change this value using the combo box in the settings' positioning tab.
The available values to chose from are timestamp, ground speed, bearing, horizontal accuracy and vertical accuracy as well as PDOP, HDOP and VDOP.
Tarkkuusvaatimus¶
Mittauksille voidaan määrittää pienin haluttu tarkkuus. Laatu ilmoitetaan kolmessa luokassa, huono (punainen), ok (keltainen) ja erinomainen (vihreä). Nämä värit näkyvät pisteinä GNSS-painikkeen päällä.
The thresholds can be defined in the settings' positioning tab.
If the Enable accuracy requirement setting is activated, you will not be able to collect new measurements with the coordinate cursor locked to the current position with an accuracy value which is bad (red).
Antennikorkeuden kompensaatio¶
Käytössä olevan antennipylvään korkeus voidaan määrittää asetuksissa. Kaikki mitattu korkeus korjataan tällä arvolla.
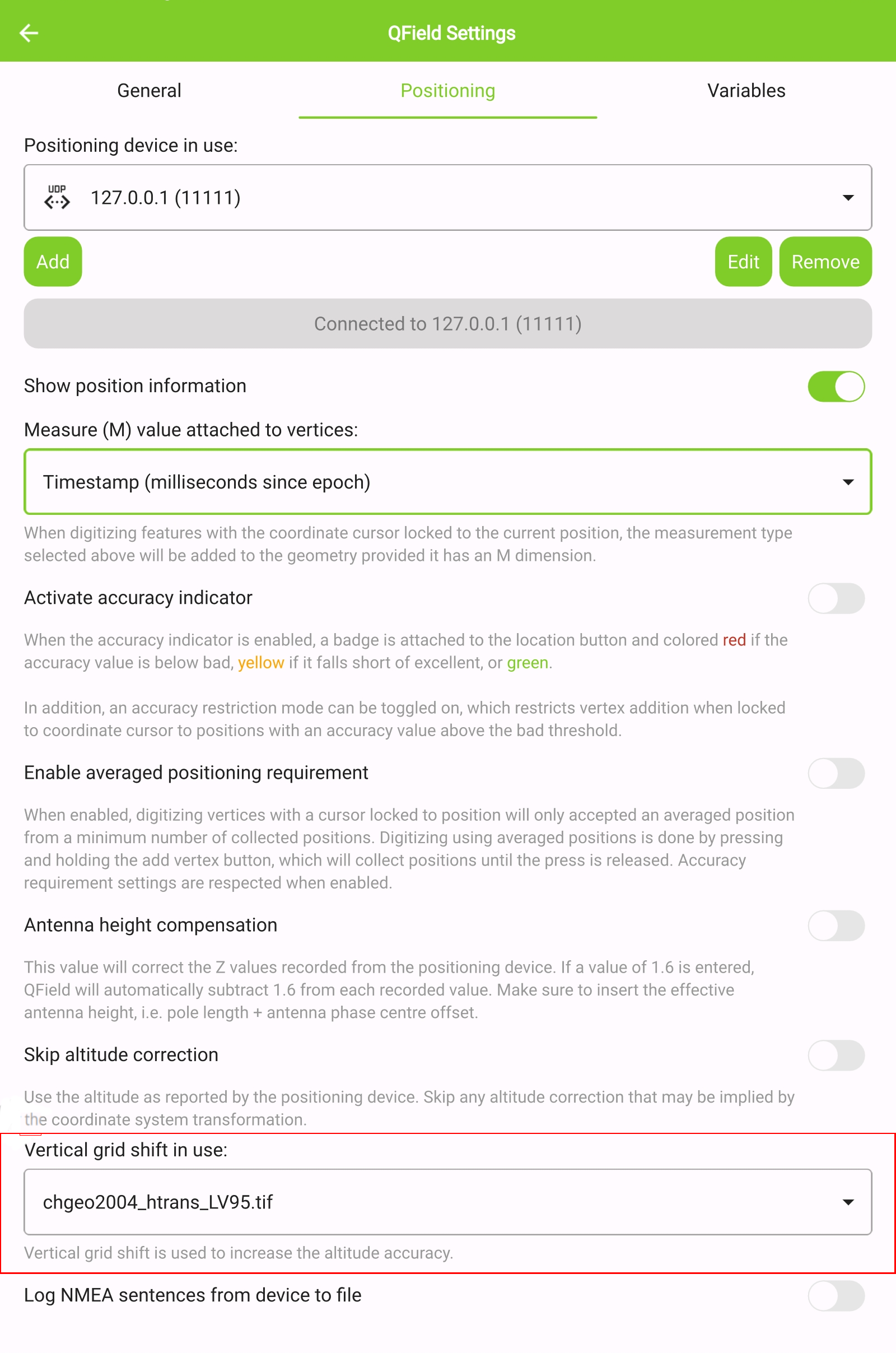
Korkeuden korjaus / pystysuora ruudukon siirto¶
Altitude values can be corrected with vertical grid shift files to calculate orthometric height.
Pystysuuntaiset ruudukon siirtotiedostot on asetettava QFieldille
asettamalla ne QField-sovelluskansioon
<drive>:/Android/data/ch.opengis.qfield/files/QField/proj.
Kun ruudukon siirtotiedosto on sijoitettu sinne, se on käytettävissä QFieldissä Paikannusasetukset kohdassa Korkeusruudukon siirto käytössä.
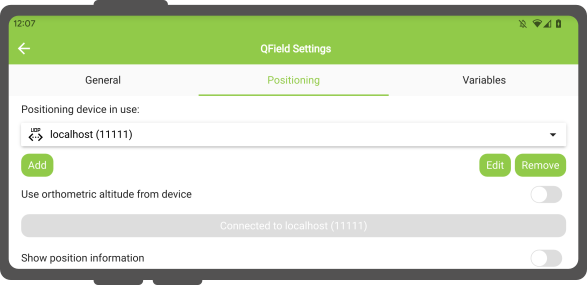
If you are using altitude correction and an external positioning device is used, consider turning Use orthometric altitude from device off.
The formats currently supported are:
- GeoTIFF (.tif, .tiff)
- NOAA Vertical Datum (.gtx)
- NTv2 Datum Grid Shift (.gsb)
- Natural Resources Canada's Geoid (.byn)
For example: For the transformation from ETRS89 (reference ellipsoid GPS) to NAP (Dutch) users can download the file nlgeo2018.gtx from NSGI and put it in the directory.
To obtain precise altitude data for Cadastral Surveying in Switzerland, users can access the file correction of the vertical grid shift through Geoid OGD from Swisstopo.
Following the download, users are advised to perform a conversion of the file labeled chgeo04_htrans_lv95.agr to chgeo04_htrans_lv95.gtx.
The QGIS processing algorithm gdal:translate (convert format) can be used for that.
Käyttö¶
Maastotyö
Lyhyt GNSS-painike painallus kytkee GNSS:n päälle ja keskittää nykyiseen sijaintiin, kun paikannustiedot ovat saatavilla.
Aktivoi muokkaustila ja paina kohdepainiketta, keskellä oleva risti tarkoittaa, että se käyttää GNSS-paikannusta.

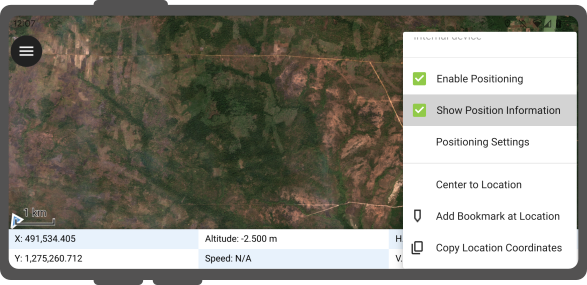
GNSS-painikkeen pitkä painallus tuo näkyviin paikannusvalikon.
Inside the positioning menu you can turn on the Show position information which will show the current coordinates which are reprojected into the project CRS along with precision information.
Note
Jos näet WGS 84 lat/lon -tiedot projektisi CRS:n tietojen sijaan, sinulla ei
todennäköisesti ole vielä signaalia.
Using an external GNSS Receiver¶
Maastotyö
QField supports connecting to external GNSS positioning devices via NMEA streams through Bluetooth, TCP, or UDP connections.
In Settings > Positioning, you can find a set of buttons to add, edit, or delete external devices as well as a dropdown list to switch between internal and saved external GNSS devices.
The breakdown of connections support by platform is as follow:
| Android | iOS | Windows | Linux | MacOS | |
|---|---|---|---|---|---|
| Bluetooth | * | ||||
| TCP | |||||
| UDP | |||||
| Sarjaportti |
(*) Bluetooth support on Windows occurs through the virtual serial port automatically created by the operating system when it connects to the GNSS device.
The NMEA sentences currently supported are GGA, RMC, GSA, GSV, GST, VTG, HDG and HDT.
Note
Make sure no other app like mock location providers are using the same connection.
External receiver log¶
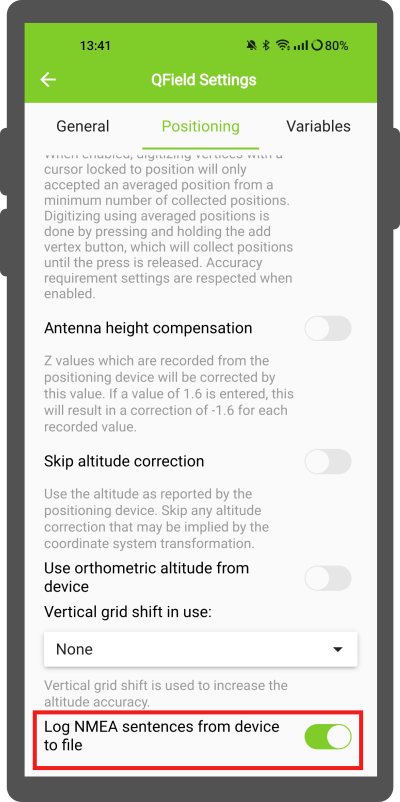
In Settings > Positioning if you have selected an external receiver as the positioning device, you will find a switch Log NMEA sentences from device to file. If this is activated, all NMEA sentences coming from external positioning devices will be logged to a file.
The logs will be placed in Android/data/ch.opengis.qfield/files/QField/logs.
Note
Be aware that if the log is always turned on, it will fill up all the storage.
Valesijainti¶
Maastotyö
On mahdollista tarjota valesijainti erillisen Android-sovelluksen kautta QFieldiin. Tähän on useita vaihtoehtoja, yksi niistä on Android NTRIP Client.
Jotta voit käyttää tätä, sinun on otettava valesijainnit käyttöön Android-laitteellasi.
Keskimääräinen paikannustoiminto¶
Maastotyö
Note
The coordinate cursor must be locked to the current location via the Lock to position button
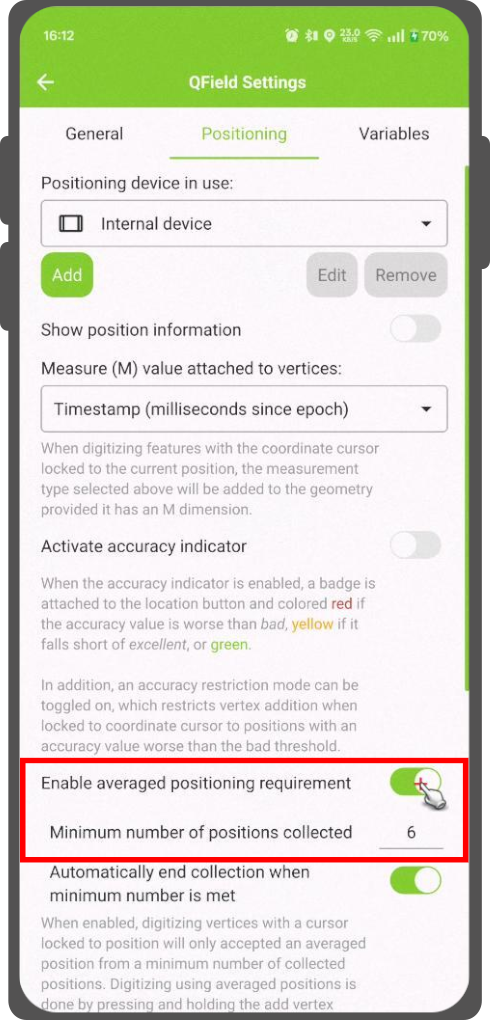
On toiminto, jonka avulla voit digitoida käyttämällä keskiarvoisia sijainteja.
Kysely alkaa pitämällä Lisää taitepiste -painiketta painettuna, jolloin paikkojen kerääminen alkaa.
Keräämisen aikana koordinaattiosoittimen päälle ilmestyy ilmaisin, joka näyttää tekstin, joka kertoo kerättyjen paikkojen nykyisen määrän. Jos keskimääräisen sijainnin vähimmäismäärän vaatimus on aktiivinen, näkyvissä on myös edistymispalkki, joka osoittaa edistymisen tämän vaatimuksen täyttämisessä.
The setting to activate an average position minimum count threshold can be found in QField settings's positioning panel. When active, holding the add vertex button is not required, a short tap on the button will begin the collection of positions and automatically add the averaged position when the minimum count requirement is met.
When using @gnss_* or @position_ variables on averaged positions, the variable will also represent the average over all collected samples.
Projektin määritys¶
Työaseman valmistelu
Sijaintimuuttujat¶
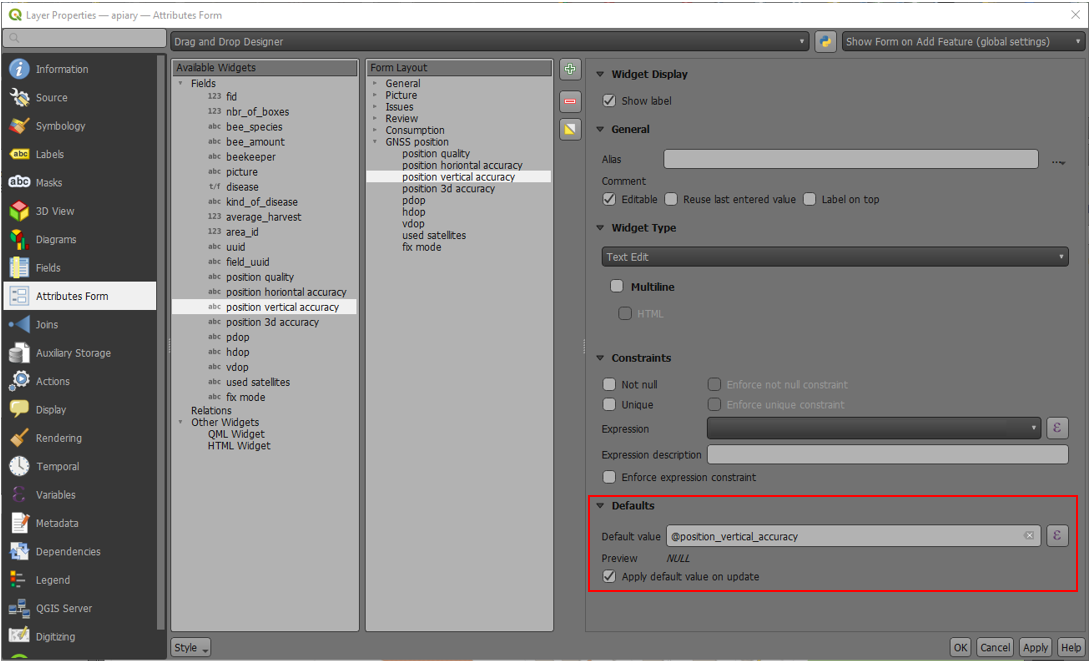
You can get access to positioning information through additional expression variables accessible in the attribute form. These will only be available when positioning is enabled.
These variables are commonly used as part of default values expressions for fields to keep track of the quality of individual measured points.
A common use case is recording the horizontal accuracy, which can be done by using the variable @position_horizontal_accuracy.
Another often used strategy is using the altitude of the current measurement which can be achieved with z(@position_coordinate).
For a complete listing of all available variables, refer to the expression variables reference documentation.
Information for GNSS Z value with Vertical grid shift in use: - Antenna height compensation=False
| Vertical Grid Shift in use | point Z Value z(geometry) | GNSS Device z(@position_coordinate) | QField Display | QField Label |
|---|---|---|---|---|
| None | Z ellipsoidal device value | Z ellipsoidal device value | Z ellipsoidal device value | Altitude: xxx.xxxx m |
| Orthometric from device | Z orthometric device value | Z orthometric device value | Z orthometric device value | Altitude: xxx.xxxx m (ortho.) |
| USER_Shift_Grid.GTX vertical grid shift |
Z shiftgrid value | Z ellipsoidal device value | Z shiftgrid value | Altitude: xxx.xxxx m (grid) |
Taitepistelokittaja¶
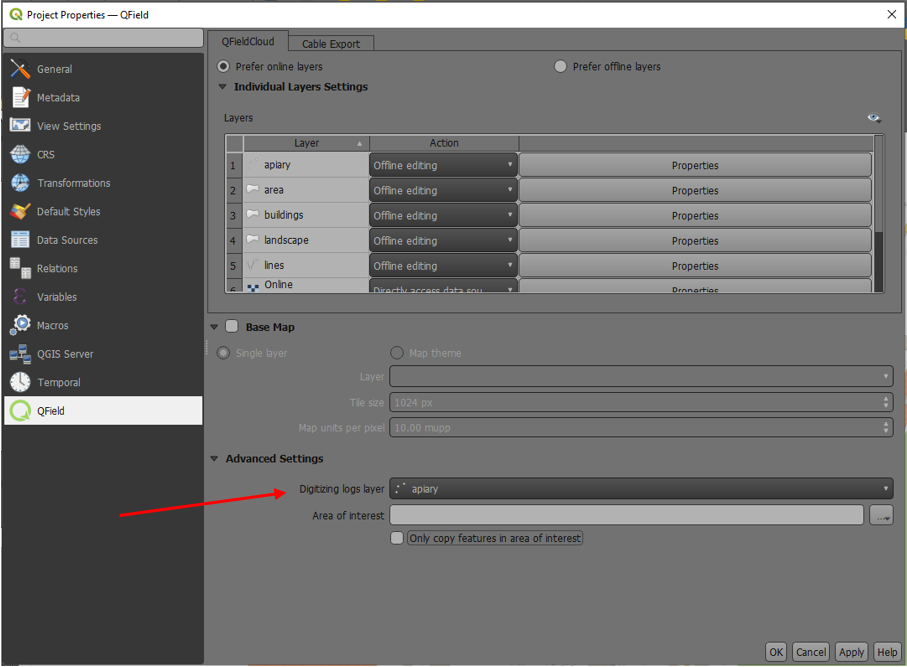
Kerätyistä pisteistä on mahdollista perustaa lokitaso. Tämä mahdollistaa kunkin taitepisteen metatietojen, kuten GNSS-laatuattribuuttien ja muiden, kirjaamisen. Tämän määrittämiseksi projektiin voidaan lisätä pistekerros ja attribuutit, jotka on määritetty tallentamaan nämä tiedot.
Then you should assign the role digitizing logger to a point layer.
Siirry QFieldSync > Projektin Ominaisuudet
To be most effective, the layer attributes should have default values that relies on the positioning variables enumerated above.